EasyPower® Tutorial - Dynamic Stability
The Dynamic Stability feature of EasyPower enables you simulate various power system events such as motor starting, device
switching, protective device tripping, load shedding, and bus faulting. It supports calculating voltage, current, speed, torque,
frequency, power, and many other values for various types of equipment using EasyPower’s dynamic models. These calculated
values are shown in time plots and spreadsheets. We recommend that you also review the Transient Motor Starting (TMS) tutorial for more information on
data entry and transient motor starting.
For this tutorial, open the DSExample-2.dez sample file located in the Samples folder.
Dynamic Stability Data
Items on the one-line need to have dynamic stability data before you can run a simulation.
- Double-click on the generator COGEN at the top right of the one-line to open the Generator Data dialog box. Select the
Stability 1 tab. In this sample file, all the necessary dynamic stability data has already been entered for you. You can
enter dynamic model data for the generator, the exciter and the governor.
- Select the Stability 2 tab. This tab is for power system stabilizer data. For studies, it is recommended that you obtain data from
manufacturers. You can also import data from the library by clicking
 Library after enabling the stabilizer model and selecting the Manufacturer and Type. Click OK when finished.
Library after enabling the stabilizer model and selecting the Manufacturer and Type. Click OK when finished.
Similarly, you can add dynamic model data to motors, ATS, contactors (in breaker and fuse data), and transformers (for
magnetization inrush).
To display the ID names for breakers and fused switches on the one-line, click Tools > Options > Text Visibility, and in the Show Name for column, select the check boxes for HV Breaker and Fuse.
Running a Dynamic Stability with ATS Transfer
Enter the Dynamic Stability focus by clicking
 Stability in the Home ribbon. The Stability ribbon is displayed as shown below and the windows are
arranged to view the one-line, the simulation plot, and the message log.
Stability in the Home ribbon. The Stability ribbon is displayed as shown below and the windows are
arranged to view the one-line, the simulation plot, and the message log.
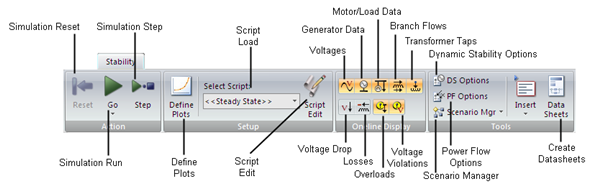
Figure 1: Stability Ribbon
As you enter the Dynamic Stability focus, EasyPower
runs a power flow solution for steady-state—note the power flow results on the one-line.
There are three ways to simulate an event:
- Double-click on an item on the one-line
- Right-click and select from the context menu
- Run a simulation script
A simulation script is a series of commands or instructions for the program to follow.
Some scripts have been created in this sample file. We will run these scripts.
- In the
Select Script box in the Stability ribbon, select the script name ATS on Standby Gen. This script
simulates disconnection of some equipment from the utility supply, which results in an ATS transferring connection to a standby
generator.
- Click
 Run Simulation.
Run Simulation.
The one-line shows the power flow results at the end of the simulation. See the figure below. The HV Fuse FS-1 shows the
“C>>O” sign next to it, letting us know that the fuse was opened. The ATS has transferred to the generator
side.
Click on the
Plot 2 tab in the
DS Plots for DSExample-2.dez window. The plot shows values of voltage, current, and frequency for the standby generator.
To view the spreadsheet data for this plot, you can drag the left edge of the plot area to the right. You can format the plot
axes or the plot area by double-clicking on an item. The message log window at the bottom describes what processes or
events occurred and the time of occurrence.
Note: To perform any command regarding a simulation in the Stability ribbon, the one-line window needs to be the
active window (selected or current window). If your one-line window caption is not highlighted, click on it to make it active.
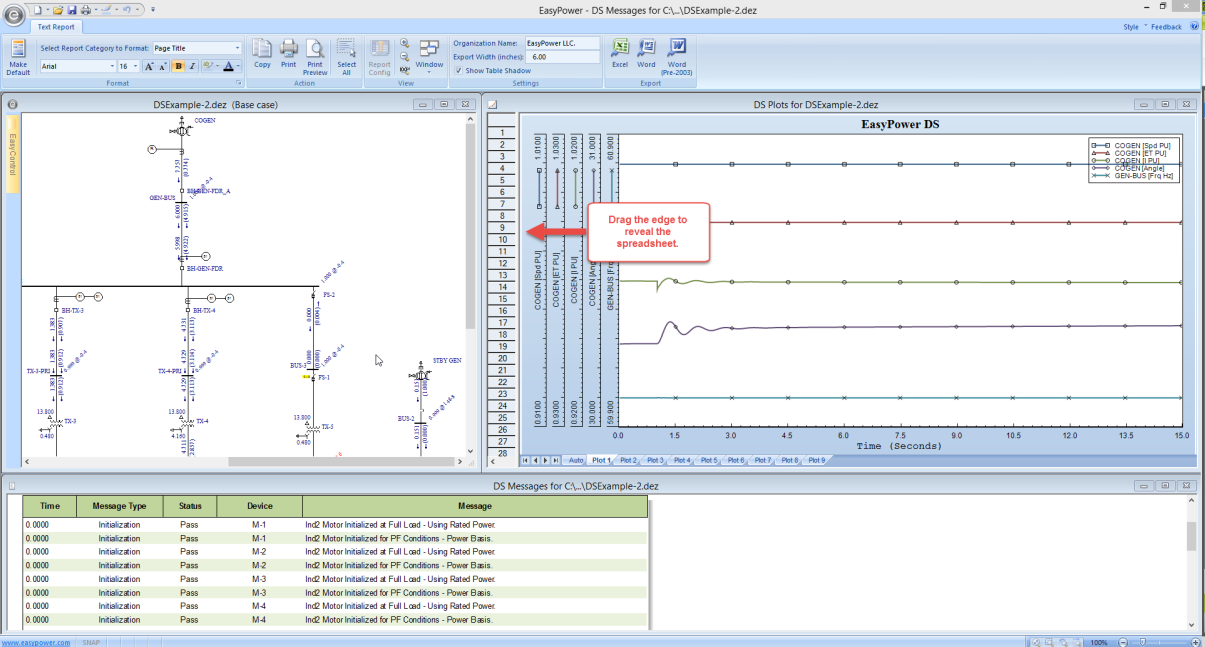
Figure 2: Simulation Results
Simulating a Bus Fault
Double-click on the bus MCC-3 to simulate a bus fault. You can observe the one-line and the message log to view various
events that follow the fault. Overcurrent relay R-6 trips to open the breaker BH-TX-3. The contactors for the motors downstream
dropout when the voltage on the bus collapses during the fault.
Plot 3 in the DS Plots window shows the bus voltage, the current to the faulted bus from the upstream side, and the current
contribution from motor M-4.
AutoPlot shows the voltage and current for the faulted bus.
Dynamic Simulation Options
From the Stability ribbon that is visible when you select the one-line, click
 DS Options. You can control the simulation through the
Dynamic Stability Options dialog box.
DS Options. You can control the simulation through the
Dynamic Stability Options dialog box.
In the
Double-Click Control tab, note the controls for
Bus to Fault. The default values are 6 seconds for
Simulation End Time and 1 second for
Delay Time Length. In the plot from the previous simulation, you will notice that the bus faulted one (1) second after
the start of the simulation, and the simulation plot ends at 6 seconds. You can control other events in a similar manner.
Simulated Load Shedding
- Select the one-line window and then in the Select Script box, select Load Shedding on Utility Out.
- Click Run Simulation.
This script simulates disconnecting the utility from the rest of the system. When all of the loads are shifted to the generator COGEN, there is a disturbance in various variables. The frequency dips, causing the under-frequency (81) relay R-2 to trip, opening breaker BH-TX-2. After this load trips, the system stabilizes in a few seconds. View Plot 1 and the message log.
Plotting User-Selected Values
When you perform a simulation by double-clicking on the one-line, data is plotted in the AutoPlot tab. Based on the type of
simulation, EasyPower chooses which values to display in the AutoPlot. To see values elsewhere in your system, you need to
define plots. Nine plots are available with up to a maximum of 5 curves per plot.
Note: AutoPlot does not appear in simulations run
from scripts.
To define a plot:
- Ensure the one-line is selected, and then click
 Define Plots in the ribbon.
Define Plots in the ribbon.
- In
Plot 4 we will view voltage, current, speed and torque for motor M-2. Select values to plot by choosing the fields for
Monitoring,
With ID and
Next To, as shown in the figure below. Values can also be selected by first selecting on an open
Monitoring cell, and then by right-clicking on motor M-2 on the one-line, and selecting the desired value type to
be plotted with the
Define Plot dialog box open. Close the Define Plot dialog box by clicking OK.
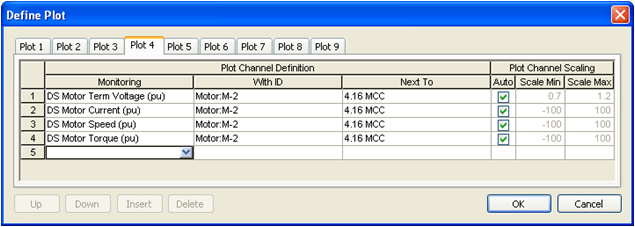
Figure 3: Defining Plots
- Click
 Reset Simulation to reset to steady-state prior to running a dynamic simulation again.
Reset Simulation to reset to steady-state prior to running a dynamic simulation again.
- Click
Run Simulation.
- Click the
Plot 4 tab in the
DS Plots window to view the effect of utility disconnection and load shedding on motor M-2 values.
Creating Simulation Scripts
You can write scripts to simulate various events and run them sequentially. Before we run scripts, we need to define plots so
that we can view results for the desired values as we just did for motor M-2. Next we will write a script to simulate
steady-state for 2 seconds, starting motor M-2, and switching off motor M-1.
- To write a new script, ensure the one-line is selected, and then click
 Script Edit in the ribbon. Click
New to add a new script. Type Start M-2 and Stop M-1 as the name of the new script. Add commands to the
script as shown in the figure below. Click
OK in the
Edit Script dialog box and
Close in the
Scripts dialog.
Script Edit in the ribbon. Click
New to add a new script. Type Start M-2 and Stop M-1 as the name of the new script. Add commands to the
script as shown in the figure below. Click
OK in the
Edit Script dialog box and
Close in the
Scripts dialog.
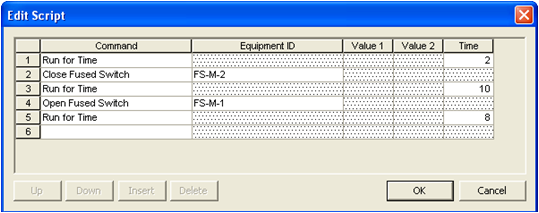
Figure 4: Script Example
- In the
Select Script box in the ribbon, select the script Start M-2 and Stop M-1.
- Before running a script, it is important to review the initial conditions of the one-line. Since we plan on starting the
motor M-2, the device upstream to this motor needs to be open.
- Click Reset Simulation.
- Right-click on the fuse FS-M-2 and select
Open and Resolve PF.
- Click
Run Simulation.
- View
Plot 4 to see the motor starting values. Browse through other plots to see the effect on other parts of the system.
- To read the values of various variables in the plot, hover the pointer over the plot. The legend shows the values at the
pointer positions.
Conclusion
This has been a brief tutorial on EasyPower’s Dynamic Stability program. If you have the PowerProtector™ coordination
feature enabled, Dynamic Stability can also simulate the response of protective devices. You can simulate contactors
dropping out from excessive voltage drop, or an ATS switching to emergency power. Remember to enter data in the
Stability tab of various equipment data dialogs as necessary in the
Database Edit focus first. Make use of scripts to simulate sequential events and use the
Define Plots feature to monitor values.