Modelos de Gobernador
Gobernador de Turbina de Gas
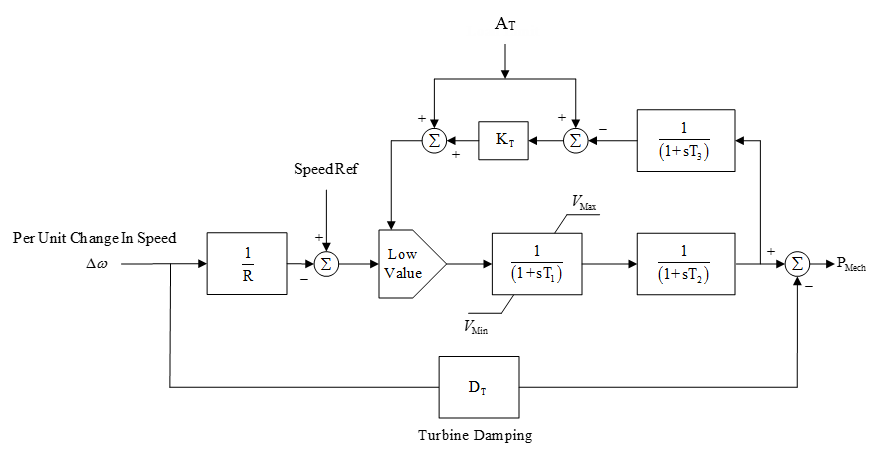
Figura 1: Diagrama de Bloques de Modelo de Gobernador de Turbina de Gas
|
Parámetro |
Unidades |
Descripción |
|---|---|---|
|
R |
pu |
Caída |
|
T1 |
Segundos |
Constante de tiempo de control del gobernador |
|
T2 |
Segundos |
Constante de tiempo de la cámara de combustión |
|
T3 |
Segundos |
Constante de tiempo de la medición de la temperatura de escape |
|
AT |
pu |
Límite de carga de la temperatura ambiente |
|
KT |
pu |
Ganancia del límite de carga |
|
VMax |
pu |
Máximo de control del gobernador |
|
VMin |
pu |
Mínimo de control del gobernador |
|
DT |
pu |
Amortiguación |
Generador Diésel Woodward
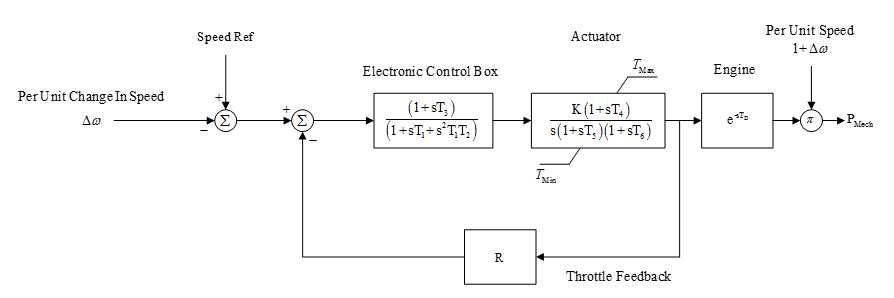
Figura 2: Diagrama de Bloques de Modelo de Generador Diésel Woodward
|
Parámetro |
Unidades |
Descripción |
|---|---|---|
|
R |
pu |
Ganancia de realimentación del acelerador (afecta a la caída) |
|
T1 |
Segundos |
Constante de tiempo del cuadro de control |
|
T2 |
Segundos |
Constante de tiempo del cuadro de control |
|
T3 |
Segundos |
Constante de tiempo del cuadro de control |
|
T4 |
Segundos |
Constante de tiempo del actuador |
|
T5 |
Segundos |
Constante de tiempo del actuador |
|
T6 |
Segundos |
Constante de tiempo del actuador |
|
TD |
Segundos |
Tiempo de retardo de disparo del motor |
|
K |
pu |
Ganancia del actuador |
|
TMax |
pu |
Par máximo del actuador |
|
TMin |
pu |
Par mínimo del actuador |
|
Caída / Isócrono |
|
Interruptor (modo de caída o modo isócrono) |
Gobernador PID1 Woodward por Vapor

Figura 3: Diagrama de Bloques de Modelo de Gobernador PID 1 Woodward por Vapor
|
Parámetro |
Unidades |
Descripción |
|---|---|---|
|
TA |
Segundos |
Constante de tiempo de control del gobernador |
|
TB |
Segundos |
Constante de tiempo de control del gobernador |
|
TE |
Segundos |
Constante de tiempo de control del gobernador |
|
TC |
Segundos |
Constante de tiempo del actuador |
|
TD |
Segundos |
Constante de tiempo de turbina |
|
K |
pu |
Ganancia de control del gobernador |
|
PMax |
pu |
Salida máxima de potencia |
|
PMin |
pu |
Salida mínima de potencia |
|
Dr |
pu |
Caída |
Más Información
| Estabilidad Dinámica | |
| Parámetros de Estabilidad Dinámica |
![]()