AFD上的注意事项
潮流模型
对于AFD潮流模拟,AFD输出上的电机会对其负荷(取决于输出频率和电压)进行响应。在EasyPower所使用的建模是基于一个典型的100马力电机对这些因素的响应进行近似的,电机在轴上的负载被建模为速度的平方。
对于低于系统频率的输出频率,驱动器将通过与频率成比例降低电压保持恒定的电压/频率。对于输出频率高于系统频率,电压一般保持恒定,没有必要随着频率的增加,电压/频率的下降而降低电压。此外,你必须小心考虑,当操作一台高于系统频率的电机时,它应该被指定为在最高的频率处容纳额外负荷。随着频率的增加,轴上的负荷也在增加,因为我们已选择速度平方负荷特性来近似行为。
从下面的表格中,我们看到一个有趣的现象。因为我们保持着在系统频率下,系统电压/频率为常数,电机的功率因数一般都会保持不变。高于系统频率,功率因数提高。这是因为在额定值为大于系统工作频率的电动机实际上是在比该电机铭牌值低的频率下操作。因此电动机的功率因数的下降。
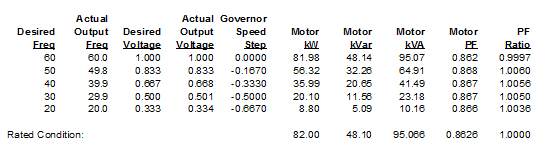
图13-1:从20到60赫兹的AFD操作的电机统计结果
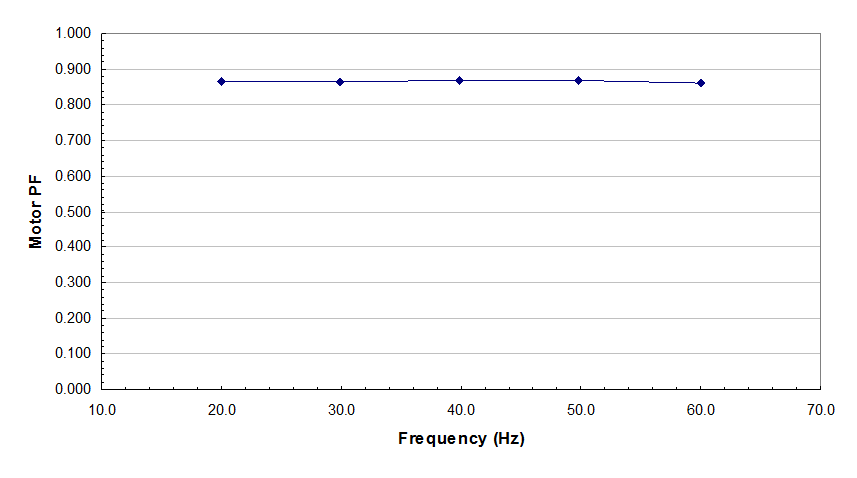
图13-2:绘制20至60赫兹的AFD操作的电机功率因数-频率图
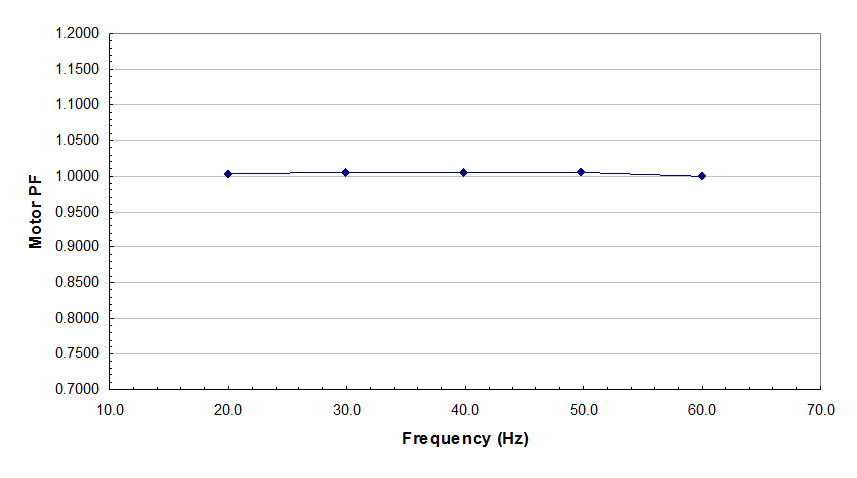
图13-3:绘制20至60赫兹的AFD操作的电机功率因数校正-频率图
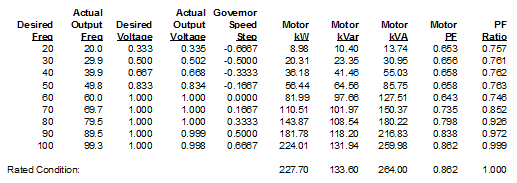
图13-4:从20到100赫兹的AFD操作的电机统计结果
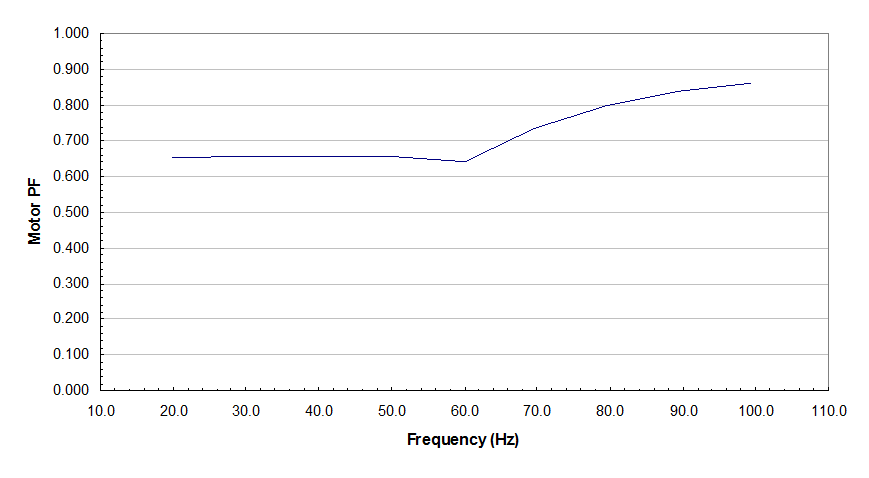
图13-5:绘制20至100赫兹的AFD操作的电机功率因数-频率图
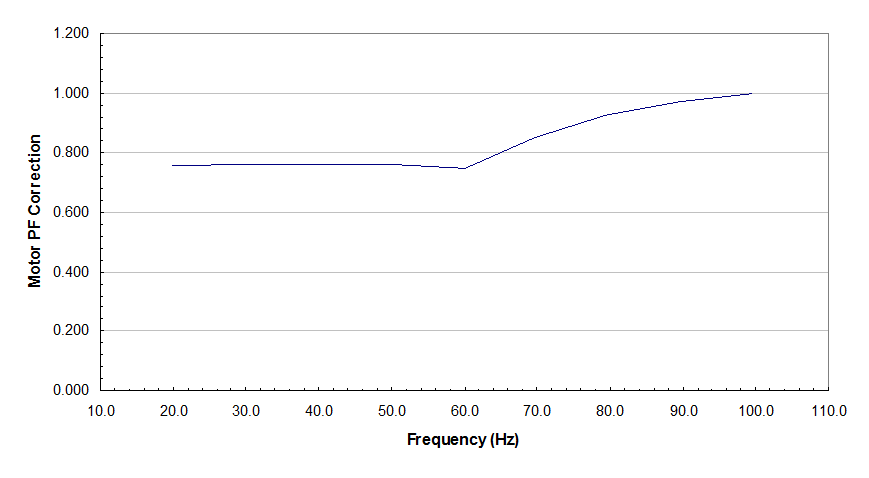
图13-6:绘制20至100赫兹的AFD操作的电机功率因数校正-频率图
所以,上面的图和表格显示电动机的功率因数和AFD输出频率之间有明显的关系。当AFD输出的电机的频率指定与系统基频不同时,这些结果可用于生成通用关系,对EasyPower中的电机pf进行校正。此外,考虑下一个表格,其中显示了提高最大运行频率的电机。我们看到,需要越来越高的马力额定值以满足更高AFD频率输出更大功率的要求。这些结果假设:
- 电机在60赫兹满载,故需要更高额定值的电机来供应额外的负荷,因为负荷转矩是按照速度平方项增长的。
- 初始的电机额定马力是100马力。
- 电机不能将其端电压升高到高于额定铭牌电压的值。
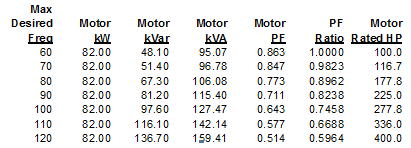
图13-7:大于60赫兹运行AFD的额定功率因数和马力
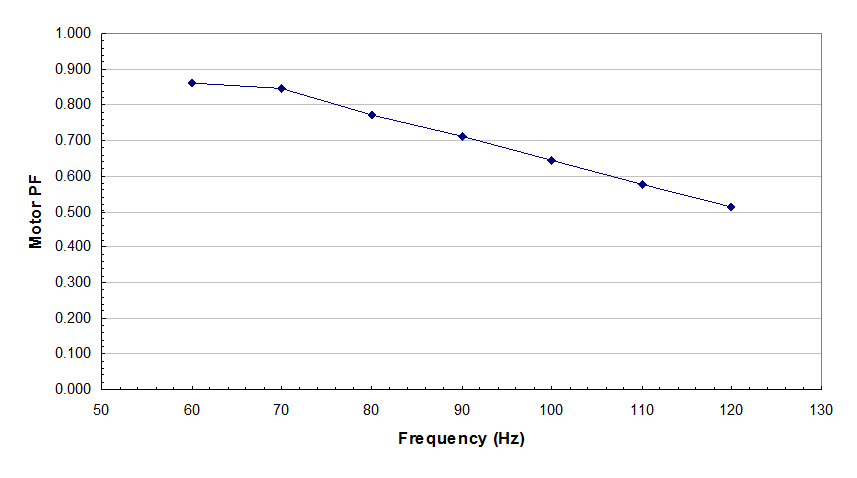
图13-8:随着我们增大电机的马力以容纳增加的负荷,绘制60赫兹的功率因数-频率图
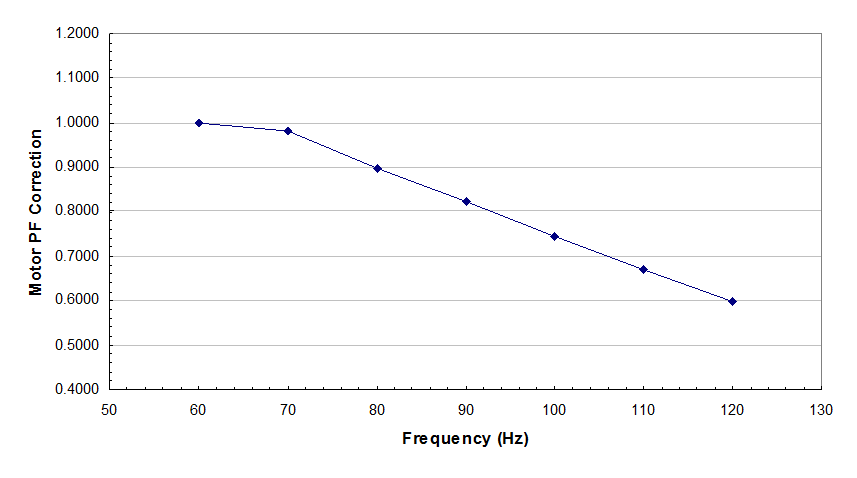
图13-9:随着我们增大电机的马力以容纳增加的负荷,绘制60赫兹的功率因数校正-频率图
因此,从我们的结果中可以很清楚地看出,低于系统频率时,不需对电机功率因数做任何校正,但是对高于系统频率的频率,我们需要考虑:
- 电机马力额定值。
- 对于一个铭牌转速高于系统频率的电机,其在系统频率下过低的功率因数。
- 将速度从系统频率提高到电机的最大频率,电机功率因数的上升。
下图对典型的100马力的电机将之纳入考虑范围,并且使用一个曲线拟合方程提出了用于仿真该动作的校正值。从这个图的修正用于 EasyPower模拟增加的频率对AFD电机的影响。
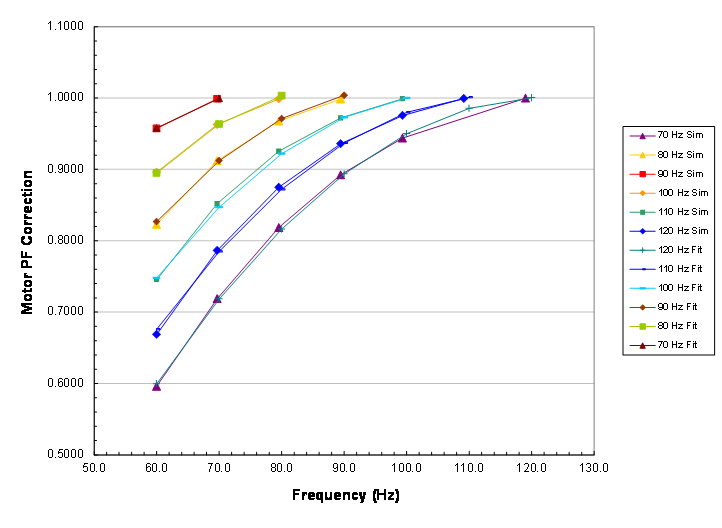
图13-10:当指定了过频容量时,电机功率因数的校正
阅读上图的最佳方式是观察涉及到给定的AFD电机应用的一条曲线。如果我们有一个AFD,并且需要在最大100赫兹的频率下运行,则我们首先选择浅绿色的曲线集(最高校正值为100赫兹处的1.0。如果该应用指定的电机具有100Hz的额定频率(也就是说,60赫兹是实际转速为1800转每分钟,额定最大转速是100赫兹即3000转每分钟)那么如果电机实际运行在60赫兹,其功率因数大约是电机额定功率因数的0.75倍。如果在80赫兹运行时,电机的功率因数将大约0.92倍的电机额定功率因数。