逆变器模型的注意事项。
直流额定电压kV
如果你在仿真一个与交流系统通过逆变器相连的直流系统,那么就需要指定合适的直流基值电压。直流电压在无负荷的条件下与交流电压有如下关系:
该方程用于6脉冲整流器并且考虑了直流母线上的纹波,并且通常用在不含大的平滑电容器的直流系统中使用;如高压直流输电和简单的大的整流器等系统。如果你知道直流母线包括直流母线电容,并且负荷条件下纹波很小,你应该使用:
强制换向阻抗
当整流器被指定为晶闸管时,强制换向阻抗必须在潮流选项卡中指定。这个阻抗用于根据金巴克方程计算对整流器的输入端的条件。此外,我们要求一个变压器放置在逆变器的上游,其具有与换向阻抗完全相同的阻抗。这就是在潮流选项卡中换向阻抗的规定就像一个变压器的原因;这使得二者之间存在一对一的对应关系。金巴克方程已被写入与高压直流线路,它总是包含一个隔离和从直流线电压(指定整流器)的电压转换变压器以及整流器。因此,要使用该方程,必须始终有一个整流器-变压器对,否则方程不适用于该模型。
潮流模型
逆变器源具有类似交流电流源控制模式的三个源控制模式。控制模式有:
- 独立(即 SWING)
- 电压控制 (i.e., PV)
- 非电压控制(i.e.PGQ)
如果指定了晶闸管类型,逆变器还需要了解整流器行为,其中包括需要更多数据。数据为换向阻抗和触发角的最小值和最大值。由于金巴克直流方程对于整流器写为阿尔法角,对于逆变器写为伽马角,我们会遵循该传统,并要求指明伽马角的最大值和最小值限制。
如果没有输入与外部逆变器变压器相匹配的换向阻抗,则直流母线电压不能正确地反映交流侧母线电压的降落。这导致直流母线电压与它应该是的值(如果它正确地包含了换向阻抗)不同。
通过以上分析,我们意识到金巴克方程并不完美。试验表明它们可能不会完全按照直流侧的功率产生交流侧的功率;这明显违反了能量守恒。如果注意到设置了整流器到逆变器的效率为100%,并且注意到功率值略有不同,则很容易明白,金巴克方程提供了交流侧的一个很好地近似,而不是对理想无损整流器的精确匹配。
还要注意的是晶闸管逆变器的类型强制为PQG,且Q没有被指定,因为金巴克方程确定它。
独立控制模式
在独立控制模式中,逆变器的输出基本上是一个平衡源。因此,不管其输入是何种直流电源是,均需要为逆变器的输出功能。这意味着可以存在系统没有解决的条件。请考虑以下条件:
- 我们有一个电池,直流电源或直流电网,为不受控电源。如果在输入到逆变器的电压降低太严重,由于逆变器输入负荷是恒定功率,我们永远无法找到解。
- 光伏设备装载不当导致其电压下降到低于VMP,从而产生条件:其功率必须降低以维持端电压在ISC。
在这种情况下,需要减少逆变器在直流系统上的负荷。
最小负载电压设定点
由于在上一节的讨论,很明显(尤其是光伏),如若要创建的直流系统上的电压崩溃状态,我们需要一种方法来减少逆变器的指定的载荷。因此,实施一种措施来降低指定负荷,知道直流电压升高到最小负荷电压设定点以上。
此功能适用于电压控制和无电压控制模式,但是在独立模式下时不起作用。在独立控制模式下,我们需要满足的交流输出的负荷(即这是一个平衡节点)。在这种控制模式中,即使直流输入电压崩溃负荷也不能变化。因此,我们引入下一节。
最小求解电压设定点 - 仅用于光伏
由于合法电压崩溃可以在逆变器的输入端发生,我们必须代替它并报警。因此,我们已经实现了最小解电压设定点。然而,这确实是仅仅会发生在降低电压以维持输出在ISC的光伏条件下。所以,当在光伏系统中的的直流电压低于此值时,求解终止,并且通知由于光伏负荷的原因无法求解。
电压控制模式
在电压控制模式下,逆变器的源基本上是制定了有功输出可控制电压设定点的PV发电机。对无功进行限制。如果输入直流电压低于最小负荷电压设定点,指定的实际功率降低,直到设定点满足。电源仍然控制电压,并且子啊有功功率控制过程中也限制无功功率。
非电压控制模式
在非电压控制模式下,逆变器的源基本上是制定了有功和无功输出的PQ发电机。如果输入直流电压低于最小负荷电压设定点,指定的实际功率降低,直到设定点满足。
直流输入孤岛
由于需要对逆变器检测其输入(是否)离线,我们增加了孤岛检查代码,可检测所有孤岛。每一个开关动作后,检测和标记孤岛。如果逆变器的输入在一个没有平衡节点的孤岛,则变频器的输出源退出服务,随后进行一个额外的开关动作,然后进行孤岛检测。这就使我们能够对逆变器删除直流输入,并且其输出将归零。
交流输出孤岛
逆变器还需要确保,如果交流输出是在没有平衡节点的孤岛,则直流输入侧不加负荷。如果逆变器的输出被创建为孤岛状态,则在逆变器的输入端的直流负荷归零,并且直流系统不会加载到逆变器上。
负荷减少死区
此设置用于当逆变器减少负荷以满足其最小电压功率降低阈值(MVKWRT)时帮助更快求解。在输入到逆变器的直流电压低于MVKWRT的状态下,我们需要减少通过逆变器的直流侧所需的功率。每次迭代用以下方法完成:
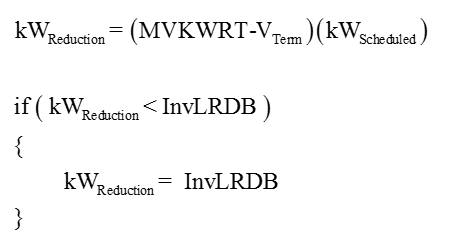
其中,InvLRDB是此注册表变量。
名称:InvLoadReductionDeadband
地点:选项
类型:DWORD
代表:值百分比
默认值:5
例如:5的值是5%,这是0.05 PU发动机。