Modelagem do Fluxo de Potência
Para a simulação de Fluxo de Potência em AFD, o motor na saída do AFD irá responder com seu carregamento dependente de sua tensão e frequência. A modelagem usada no EasyPower é aproximada com base em uma resposta típica de motor de 100 HP a esses fatores, com a carga do motor no eixo modelada como velocidade quadrática.
Para frequências de saída abaixo da frequência do sistema, um drive irá manter a relação Volt/Hz diminuindo a tensão proporcionalmente à frequência. Para frequências de saída acima da frequência do sistema, a tensão é tipicamente mantida constante, como não existe a necessidade de diminuir a tensão visto que a relação Volts/Hz cai em função do aumento da frequência. Adicionalmente, você deve tomar cuidado ao considerar a operação de um motor acima da frequência do sistema, isto deveria ser especificado para acomodar a carga adicional nas frequências mais altas. Quando as frequências aumentam, também aumenta a carga no eixo, visto que se elegeu o comportamento para aproximar da característica da carga variando com o quadrado da velocidade.
A partir das tabelas abaixo, pode-se ver um comportamento interessante. Por causa que esta se mantendo constante a relaçao Volts/Hz, quando abaixo da frequência do sistema, o fator de potência do motor é praticamente constante. Acima da frequência do sistema, o fator de potência aumenta. Isto acontece porque um motor especificado para operar acima da frequência do sistema esta na realidade operando a frequências menores do que a de placa do motor especificado. Assim, existe uma queda no fator de potência do motor.
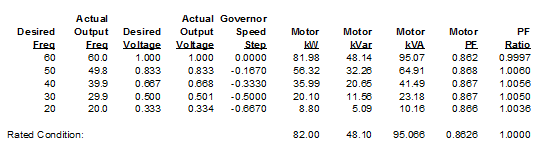
Figura 1: Resultados Tabulados de Motor para AFD operando de 20 a 60 Hz
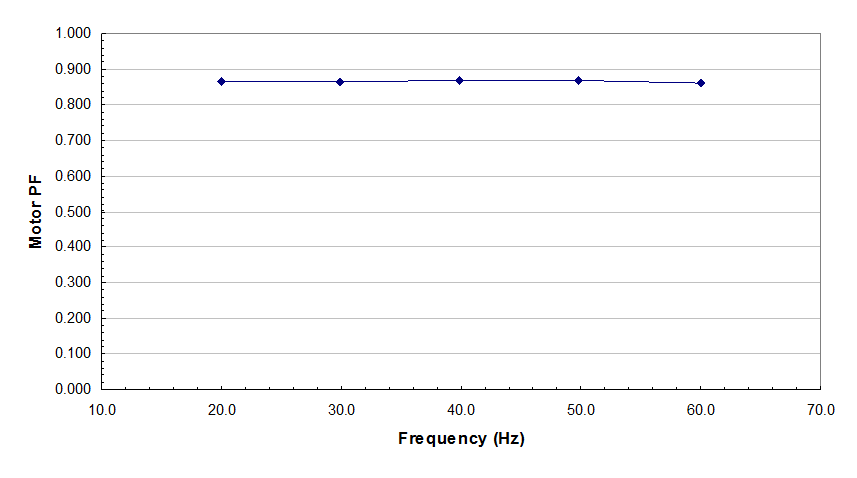
Figura 2: Plotagem do FP x Frequência do Motor para AFD Operando entre 20 e 60 Hz
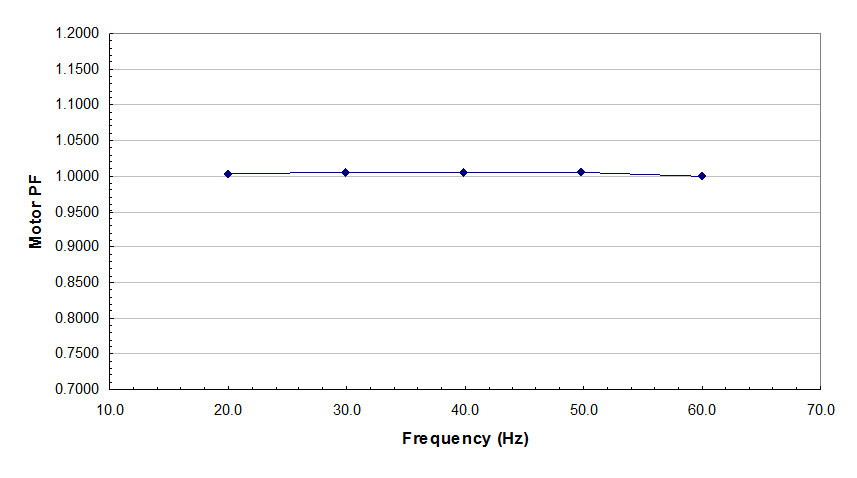
Figura 3: Plotagem da Correção para FP x Frequência para AFD Operando de 20 a 60 Hz
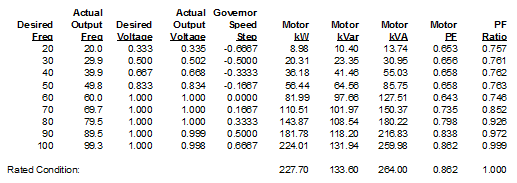
Figura 4: Resultados Tabulados de Motor para AFD Operando de 20 a 100 Hz
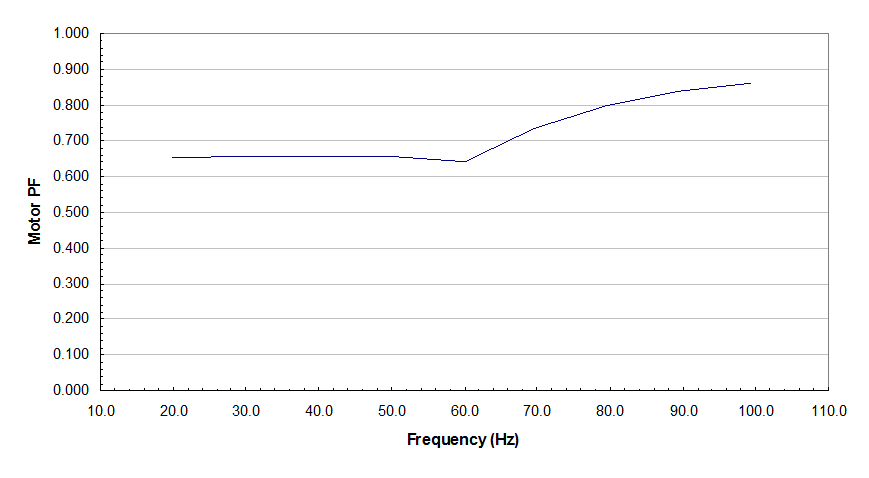
Figura 5: Plotagem do PF x Frequência de Motor para AFD Operando de 20 a 100 Hz
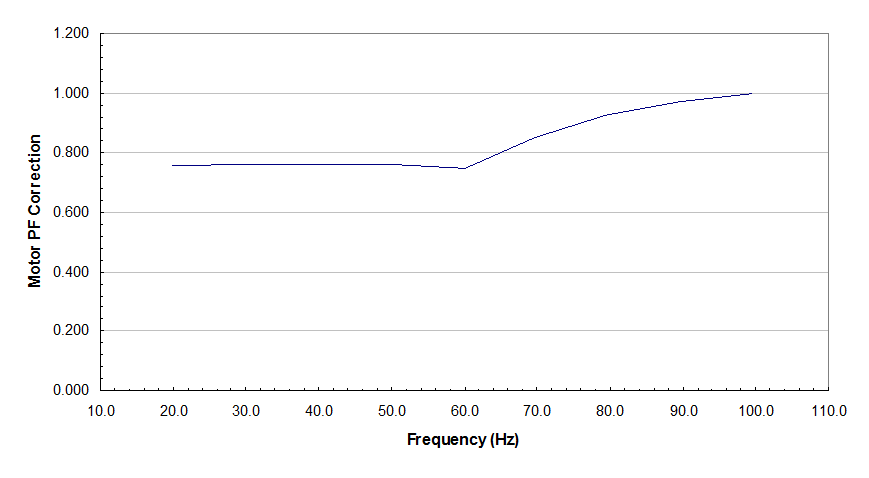
Figura 6: Plotagem da Correçao para PF x Frequência para AFD Operando de 20 a 100 Hz
E também, as tabelas e plotagens acima mostrar uma clara relação entre o fator de potência do motor e a frequência de saída do AFD. Esses resultados são usados para gerar relações gerais que aplicam correções ao motor pf no EasyPower quando um motor em uma saída de AFD tem uma frequência especificada diferente da frequência base do sistema. Além disso, considere a próxima tabela onde nós mostramos motores especificados para o aumento da frequência máxima de operação. Vê-se que aumentando-se os HP nominais mais elevados são necessários para satisfazer os requisitos de potência maiores para as frequências de saidas mais altas do AFD. Esses resultados assumem:
- Que o motor está completamente carregado a 60 Hz de modo que um motor maior é necessário para suprir a carga adicional visto que o torque da carga aumenta com o quadrado da velocidade.
- Os HP nominais do motor é inicialmente 100 HP.
- O motor não pode ter a tensão nos seus terminais acima da tensão nominal de placa.
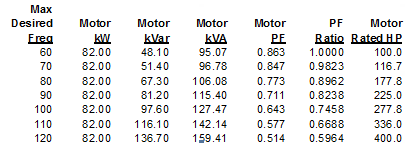
Figura 7: HP e PF Nominais para a Operação de AFD Maiores do 60 Hz
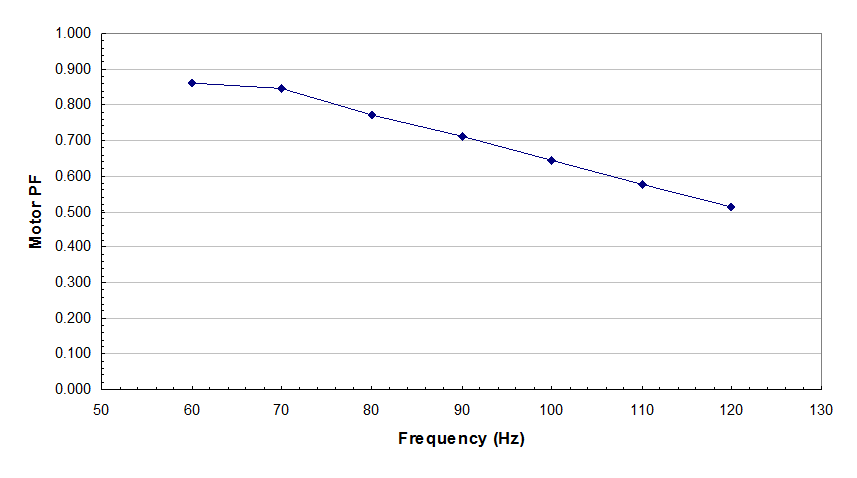
Figura 8: Plotagem de PF a 60 Hz x Frequência quando Aumenta-se os HP do Motor para Acomodar o Aumento do Carregamento
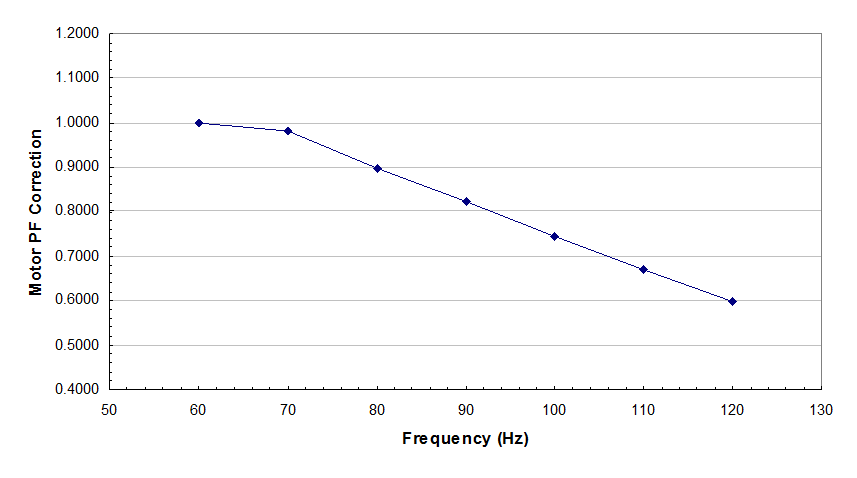
Figura 9: Plotagem da Correção do FP a 60 Hz x Frequência conforme Aumenta-se os HP do Motor para Acomodar o Aumento do Carregamento
Assim, a partir de nosso resultados, fica claro que abaixo da frequência do sistema não e necessario fazer qualquer correção do fator de potência do motor, mas para frequências acima do sistema, é necessário considerar:
- HP Nominais do Motor
- O fator de potência muito mais baixo na freqüência do sistema para um motor com uma velocidade da placa maior do que a freqüência do sistema.
- O aumento do fator de potência do motor com o aumento da velocidade a partir da freqüência do sistema até a freqüência máxima do motor.
A plotagem abaixo leva em conta esta consideração para nosso motor de 100 HP típico e apresenta as correções necessárias com as equações obtidas através de "curve fit" usadas para simular esta ação. As correções dessa plotagem são usadas no EasyPower para simular os efeitos de aumento de frequência nos motores AFD.
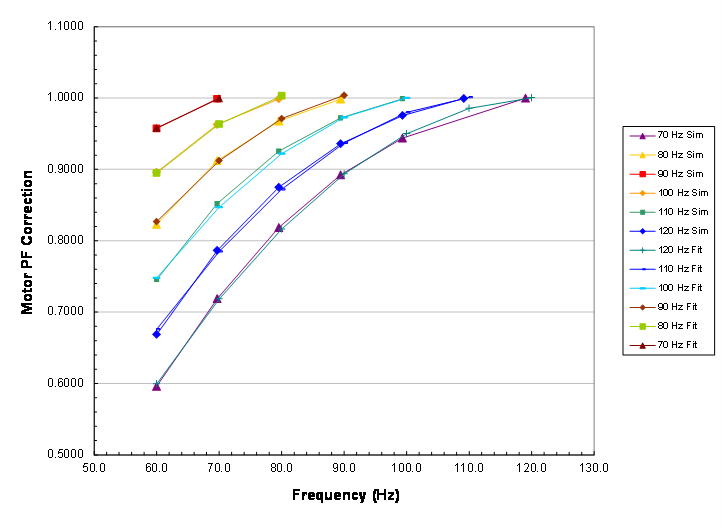
Figura 10: Correção para FP do motor quando especificado com capacidade de sobre-frequência
A melhor maneira de ler a plotagem acima é olhar uma curva em relação a uma aplicação de um dado AFD de um motor. Se nós temos um AFD e é necessário operar esse motor, digamos a uma frequência máxima de 100 Hz, então nós devemos primeiro escolher a configuração de curva que tem o maior valor de correção de 1.0 em 100 Hz. Se o motor especificado para esta aplicação tem velocidade nominal de 100 Hz (i.e. na velocidade real de 1800 RPM para 60 Hz e a velocidade máxima de 3000 RPM a 100 Hz) então se o motor estivesse rodando a 60 Hz, seu fator de potência poderia ser de aproximadamente 0.75 vezes o seu fator de potência nominal. Se o mesmo estivesse rodando a 80 Hz, o fator de potência seria de aproximadamente 0.92 vezes o fator de potência nominal do motor.