Modelos de Motor
Motor de Inducción de Flujo Doble Jaula
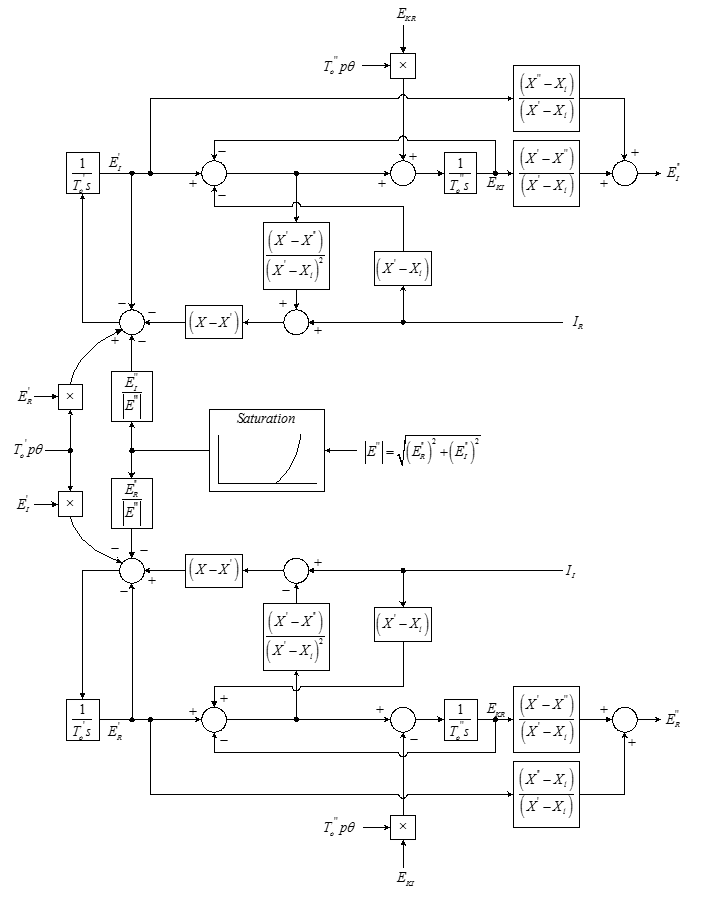
Figura 1: Modelo de Motor de Inducción de Flujo Doble Jaula
|
Parámetro |
Unidades |
Descripción |
|---|---|---|
|
HP Nominal |
HP |
|
|
Eficiencia Nominal |
Por ciento |
|
|
Velocidad Nominal |
RPM |
|
|
Tensión Nominal |
Voltios LL |
|
|
Corriente Nominal |
Amperios |
|
|
Factor de Potencia Nominal |
|
|
|
Deslizamiento Nominal |
pu |
Deslizamiento nominal |
|
Par de Arranque |
pu |
Par de Arranque |
|
Corriente de Arranque |
pu |
Corriente de Arranque |
|
Factor de Potencia de Arranque |
|
Factor de Potencia de Arranque |
|
Par Máximo de la Curva |
pu |
Par Máximo de la Curva Nominal |
|
Ra |
pu |
Resistencia del devanado del estator (resistencia de la armadura) |
|
Xl |
pu |
Reactancia de fuga del estator |
|
X |
pu |
Reactancia sincrónica no saturada |
|
X’ |
pu |
Reactancia transitoria no saturada |
|
X’’ |
pu |
Reactancia sub-transitoria no saturada |
|
T’o |
Segundos |
Constante de Tiempo Transitorio Circuito Abierto |
|
T’’o |
Segundos |
Constante de Tiempo Sub-transitorio Circuito Abierto |
|
E1 |
pu |
Primera tensión para definir saturación |
|
E2 |
pu |
Segunda tensión para definir saturación |
|
S( E1 ) |
pu |
Saturación en E1 |
|
S( E2 ) |
pu |
Saturación en E2 |
|
H |
kW-Sec / kVA |
Inercia combinada de la máquina y carga |
|
Ld Tran Str |
Segundos |
Tiempo cuando la carga transfiere – arranque hasta en marcha |
|
Ld Tran Rmp |
Segundos |
Tiempo hasta transfiere carga – arranque hasta en marcha |
|
SoftSt V1 (%) |
Por ciento |
Tensión de terminal inicial al arrancar el motor |
|
SoftSt V2 (%) |
Por ciento |
Tensión intermedia para arrancar el motor después de T12 segundos. Esto define la primera pendiente de la rampa. |
|
SoftSt V3 (%) |
Por ciento |
Tensión final para arrancar el motor al final de la rampa después de T23 segundos. Esto define la última pendiente de la rampa. |
|
SoftSt T12 (sec) |
segundos |
Tiempo transcurrido entre V1 y V2 |
|
SoftSt T23 (sec) |
segundos |
Tiempo transcurrido entre V2 y V3 |
Nota: OC = Circuito Abierto
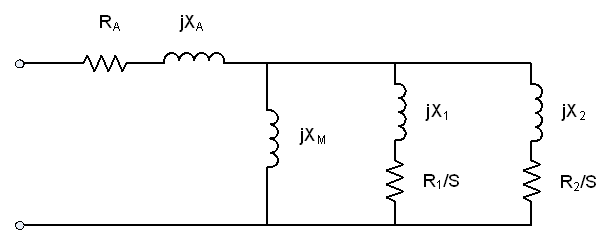
Figura 2: Modelo de Motor de Inducción de Flujo Doble Jaula – Forma Tipo 1
Motor Sincrónico
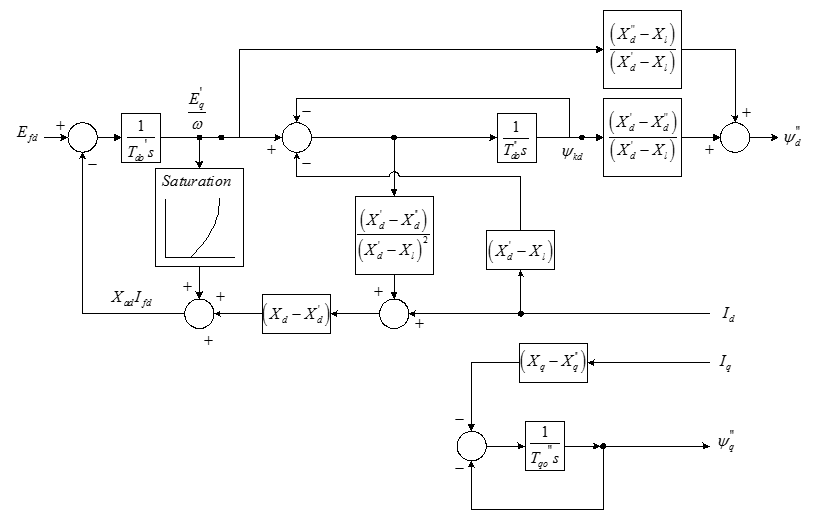
Figura 3: Diagrama de Bloques de Modelo de Motor Síncrono
|
Parámetro |
Unidades |
Descripción |
|---|---|---|
|
HP Nominal |
HP |
|
|
Eficiencia Nominal |
Por ciento |
|
|
Velocidad Nominal |
RPM |
|
|
Tensión Nominal |
Voltios LL |
|
|
Corriente Nominal |
Amperios |
|
|
Factor de Potencia Nominal |
|
|
|
Ra |
pu |
Resistencia del devanado del estator (resistencia de la armadura) |
|
Xl |
pu |
Reactancia de fuga del estator |
|
Xd |
pu |
reactancia sincrónica no saturada del eje-d |
|
Xq |
pu |
reactancia sincrónica no saturada del eje-q |
|
X’d |
pu |
reactancia transitoria no saturada del eje-d |
|
X’’d = X’’q |
pu |
reactancia transitoria no saturada del eje-d & q |
|
T’do |
Segundos |
constante de tiempo de Circuito Abierto transitorio del eje-d |
|
T’’do |
Segundos |
constante de tiempo de Circuito Abierto sub-transitorio del eje-d |
|
T’’qo |
Segundos |
constante de tiempo de Circuito Abierto sub-transitorio del eje-q |
|
E1 |
pu |
Primera tensión para definir saturación |
|
E2 |
pu |
Segunda tensión para definir saturación |
|
S( E1 ) |
pu |
Saturación en E1 |
|
S( E2 ) |
pu |
Saturación en E2 |
|
H |
kW-Sec / kVA |
Inercia combinada de la máquina y carga |
|
Ld Tran Str |
Segundos |
Tiempo cuando la carga transfiere – arranque hasta en marcha |
|
Ld Tran Rmp |
Segundos |
Tiempo hasta transfiere carga – arranque hasta en marcha |
|
EFD App Speed |
Por ciento |
La velocidad a la que se aplica el campo durante el arranque |
|
EFD App Value |
Por ciento |
Valor de la tensión de campo para aplicar durante el arranque |
|
Rev Pwr Del |
Segundos |
Tiempo que necesita para disparar la detección de potencia inversa |
|
SoftSt V1 (%) |
Por ciento |
Tensión de terminal inicial al arrancar el motor |
|
SoftSt V2 (%) |
Por ciento |
Tensión intermedia para arrancar el motor después de T12 segundos. Esto define la primera pendiente de la rampa. |
|
SoftSt V3 (%) |
Por ciento |
Tensión final para arrancar el motor al final de la rampa después de T23 segundos. Esto define la última pendiente de la rampa. |
|
SoftSt T12 (sec) |
segundos |
Tiempo transcurrido entre V1 y V2 |
|
SoftSt T23 (sec) |
segundos |
Tiempo transcurrido entre V2 y V3 |