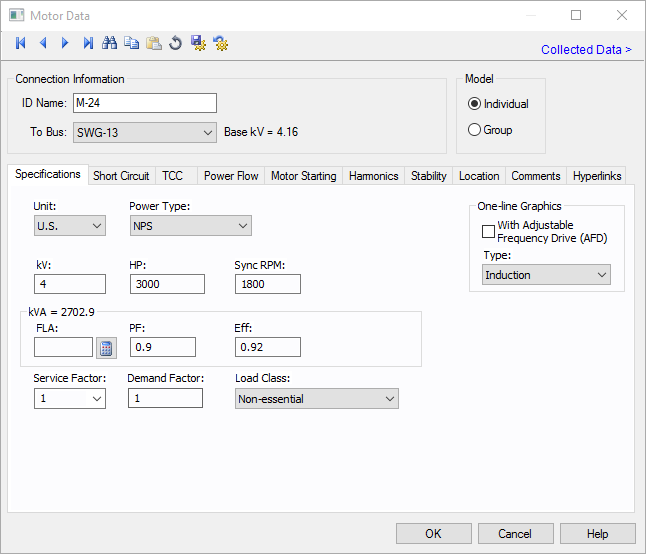
Figura 1:1 Caixa de Diálogo de Dados de Motor
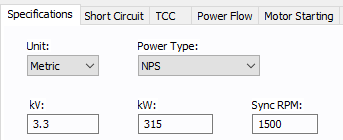
Figura 2:2 Caixa de Diálogo dos Dados de Motor (Métrico)
Esta caixa de diálogo inclui as seguintes áreas e abas:
Veja Abas Comuns para informação da Localização [Location], Comentários [Comments], Hiperlinks [Hyperlinks], Galeria de Mídia [Media Gallery], ou abas de Dados Coletados [Collected Data].
Figura 1:1 Caixa de Diálogo de Dados de Motor
Figura 2:2 Caixa de Diálogo dos Dados de Motor (Métrico)
| Opção | Descrição |
|---|---|
| Unidade | Escolha US ou Métrico. |
| Tipo de Potência [Power Type] |
O tipo de aplicação da potência do motor. Escolhido de:
|
| kV | Tensão Nominal do Motor Isto é normalmente 460V num sistema de 480V, ou 2300 V num sistema de 2400 V. |
| Hp |
Potência do Motor em HP. Os motores podem ser representados individualmente ou como um agrupamento de motores. Para agrupamento de motores, entre com a potência total (HP) do agrupamento. Isto é exibido se a unidade escolhida é US. |
|
kW |
KiloWatts do Motor Os motores podem ser representados individualmente ou como um agrupamento de motores. Para agrupamento de motores, entre com a potência total (kW) do agrupamento. Isto é exibido se a unidade escolhida é métrica. |
| RPM |
Rotações por minuto. Usada nos relatórios para a definiçao dos fatores de multiplicação das impedâncias para cálculos de curto-circuito ANSI e IEC. Por default, usa-se 1800 para ANSI e 1500 para IEC, a menos que seja alterada nas configurações de motores para um valor diferente. |
| Classe de Carga [Load Class] | Para classificar a carga em termos de importância. Pode-se especificar Essencial [Essential], Critica [Critical], ou Não-essencial [Non-essential]. Este campo não afeta os cálculos. Pode ser usado na base de dados em consulta para distinguir uma certa classe de carga de outra. Veja Consultas Avançadas para maiores informações. |
In [FLA]  |
Calcular [Calculate] procura a corrente de plena carga a partir das tabelas do NEC se os HP do motor está listado na tabela. O campo da corrente de plena carga não e necessária, mas um valor acima de 0 afeta como os kVA são calculados. Veja Cálculo dos kVA do Motor [Motor kVA Calculations]. |
| FP [PF] | Fator de potência de operação do motor. Isto é usado com o campo da eficiência para determinar os KVA do motor. Grupos de motores devem usar uma valor médio de fator de potência. |
| Efic. [Eff] | Eficiência de operação do motor. Isto é usado com o campo do Fator de Potência para deterinar os kVA do motor. Grupos de motores devem usar um valor médio de eficiência. |
| Fator de Serviço | Fator pelo qual o motor pode ser sobrecarregado de forma segura. Você pode escolher qualquer valor entre 1 e 1.25. |
| Fator de Demanda [Demand Factor] | Este fator é usado para calcular os kVA Demandados ou os Ampères para o motor. O fator de demanda para um motor é a relação entre a carga máxima do motor e a potência nominal total do motor. |
| Gráfico no Unifilar [One-line Graphics] | |
| Com Acionamento de Frequência Ajustável [With Adjustable Frequency Drive] |
Marcando esta caixa de seleção altera o símbolo do motor no unifilar como mostrado abaixo.
Figura 3:3 Símbolo do motor com Acionamento de Frequência Ajustável |
| Tipo | Tipo do Motor [Motor type] (indução, síncrono, compensador síncrono ou DC). Esta escolha afeta as impedâncias do motor nos cálculos de curto-circuito. O tipo determina o símbolo utilizado para o motor no unifilar. |
Existem duas maneiras de se calcular os kVA do motor que estão apresentados na seção Especificações [Specifications] na caixa de diálogo do Motor. A que o EasyPower usa depende de qual campo você deseja entrar. Abaixo os métodos de cálculo dos kVA são apresentados em ordem de prioridade:
Se a In [FLA] do motor é maior do que zero, os kVA do motor é calculado pela equação seguinte.
KVA = (1.73)(FLA)(kVmtr)
Se a In [FLA] é deixada em branco ou zero, o kVA do motor será determinado pela equação seguinte.
KVA = (HP)(0.746)/((EFF)(PF))
O exposto acima se aplica para os kVA especificados para o Motor. O módulo de Curto-Circuito sempre utiliza os kVA especificados para o motor ao calcular a corrente de curto-circuito do motor. Entretanto, o módulo de Fluxo de Potência, que utiliza os kVA especificados para o Motor por default, tem a opção de usar os valores kW e kVAr de tempo real do SCADA para determinar os kVA. Esta opção se encontra na caixa de diálogo Dados do Motor [Motor Data], na aba Fluxo de Potência [Power Flow]
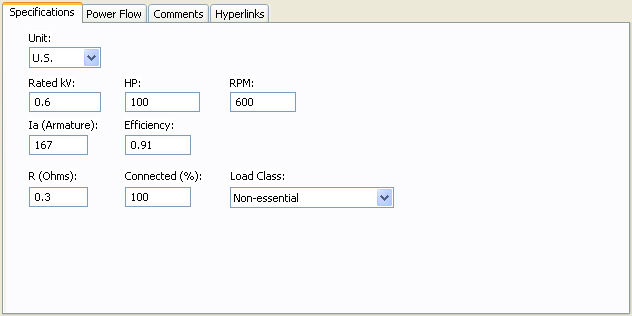
Figura 4:4 Aba Especificações para Motores DC
| Opção | Descrição |
|---|---|
| Unidade | Escolha entre US ou Métrico [Metric]. |
| Tensão Nominal [Rated kV] | Tensão Nominal do Motor |
| Hp/kW | HP nominal do motor (Unidade U.S.) ou kiloWatts (Unidade Métrica) |
| RPM | Rotações por minuto. |
| Ia (Armadura) [(Armature)] | Corrente nominal da armadura em Ampères. |
| Rendimento | Relaçao entre a potência mecânica de saída pela potência de entrada. |
|
R (Ohms) |
Resistência da armadura em Ohms. Isto afeta a contribuição de curto-circuito. |
| Conectado (%) [Connected (%)] | Escala a contirbuição de curto-circuito do motor. |
| Classe de Carga [Load Class] | Para classificar a carga em termos de importância. Pode-se especificar Essencial [Essential], Critica [Critical], ou Não-essencial [Non-essential]. Este campo não afeta os cálculos. Pode ser usado na base de dados em consulta para distinguir uma certa classe de carga de outra. Veja Consultas Avançadas para maiores informações. |

Figura 5:5 Aba de Curto-Circuito da Caixa de Diálogo de Dados do Motor
| Opção | Descrição |
|---|---|
| CC ANSI |
Provê de uma maneira fácil os multiplicadores para os esforços de interrupção nas impedâncias em conformidade com a Norma ANSI . Os números código podem ser encontrados de acordo com o tipo, tamanho e método de modelagem do motor. Independente do código escolhido, os valores dos multiplicadores da Norma ANSI para interrupção são utilizados. Os códigos disponíveis nesta lista mudam depdendendo do que você houver selecionado no campo Tipo [Type] da aba Especificações [Specifications] . A utilizaçao do campo Código ANSI é o método recomendado para entrar com a impedância do motor para assegurar que o multiplicador adequado das impedâncias de interrupçao serão usados para os cálculos conforme a Norma ANSI1,2,3,4. Veja Impedâncias Código ANSI para maiores informações. Se a caixa de seleção Acionamento de Frequência Ajustável [Adjustable Frequency Drive] é marcada na aba Especificações [Specifications] , as seguintes opções estão disponíveis para o campo Código ANSI:
Referência:
|
| CC IEC | Quando esta opção é escolhida, o método de cálculo de curto-circuito IEC é usado e os códigos ANSI ficam indisponíveis. Veja Cálculos da Impedância IEC e X/R. |
| X/R | Você pode ou digitar a relação entre a reatância e a resistência, ou clicar em Calcular [Calculate] para ter este campo preenchido pelo EasyPower. |
| X" or Xlr | Reatância subtransitória em por cento na potência base do motor. Normalmente este valor é 16.7% para motores de indução. |
| Calcular | Clique para fazer com que o EasyPower preencha os campos de X/R e X" ou Xlr. Você pode especificar os HP médios para grupos de motores em Ferramentas > Opções > Equipamentos [Tools > Options > Equipment]. |
| Conexão |
Provê uma maneira fácil de ajustar a potência total de motores usada na determinação das correntes de curto-circuito. Alterando-se o percentual conectado, os HP reais (valor total conectado) introduzido no campo HP pode permanecer estático. Isto reduz erros de modelagem e elimina base de dados múltiplas para diferentes contingências. Por exemplo, um CCM tem um grupo de motores de indução (todos acima de 50 HP) que somam um carga total de 600 HP. Entretanto, 300 HP é considerado como backup e não estão funcionando. Para se manter os registros adequados dos HPs no CCM, os 600 HP deveriam ser introduzidos no campo HP. Visto que somente 300 HP estão rodando simultaneamente e podem contribuir correntes de curto-circuito, o campo conectado é configurado para 50%. |
|
RMf / X"d |
Relaçao entre a resistência fictícia e a reatância subtransitória que é usada para calcular a corrente de pico. Se deixada em branco, o EasyPower calcula o valor tomando como base a norma IEC-60909. Esta mensagem aparece para motores síncronos se a opção Mostrar campos e cálculos de X/R baseado na IEC-60909 [Show fields and X/R calculations based on IEC-60909] é escolhida em Ferramentas > Opções > Equipamentos [Tools > Options > Equipment]. |
|
|
|
Solicitação Momentânea [Momentary Duty] |
Solicitação de Interrupção [Interrupting Duty] |
|---|---|---|---|
|
Sincr |
Síncrono |
1.0 X"dv |
1.5 X"dv |
|
Ind>1000 |
Motor de Indução [Induction Motor] > 1000 Hp |
1.0 X"dv |
1.5 X"dv |
|
> 250 @ 3600 |
Motor de Indução [Induction Motor] > 250 Hp a 3600 RPM |
1.0 X"dv |
1.5 X"dv |
|
>50 |
Motor de Indução [Induction Motor] ou Grupo de Motores [Motor Group] > 50 Hp |
1.2 X"dv |
3.0 X"dv |
|
<50 |
Grupo Motor de Indução [Induction Motor Group] < 50 Hp |
1.67 X"dv |
X"dv Infinito [Infinite ] |
|
Agrupamento [Lumped] |
Agrupamento de Motores de Indução |
1.0 X"dv (X=25%) |
3.0 X"dv |
Nota: X" para grupos de motores de indução >50 HP e <50 HP são adotados tipicamente como sendo igual a 16.7%. Usando os multiplicadores de impedância, isto corresponde a uma contribuição equivalente de motor entre 3.6 a 4.8 vezes a corrente de plena carga.
|
Modelo |
Tipo do Motor |
Cálculos da Impedância e X/R |
|---|---|---|
|
Individual |
Indução sem AFD |
1) Calcula o MW por pole-par de polo dividindo-se os MW pelos pores-de-polo.
2) Calcula a relação X/R do motor.
A impedância é 16.7% |
|
Grupo |
Indução sem AFD |
A impedância e o X/R são calculados como segue:
|
|
Individual ou Grupo |
Indução com AFD DC com AFD |
A impedância é 16.7% e a relação X/R é 10. |
|
Individual ou Grupo |
Síncrono Compensador Síncrono |
Utiliza os cálculos default ANSI para a impedância e a relação X/R. |
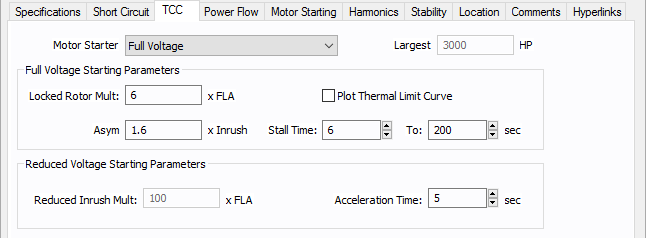
Figura 6:1 Aba Seletividade da Caixa de Diálogo dos Dados do Motor
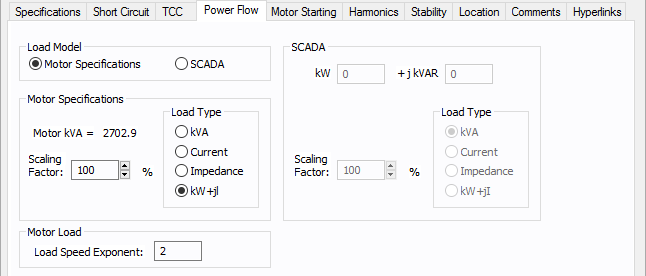
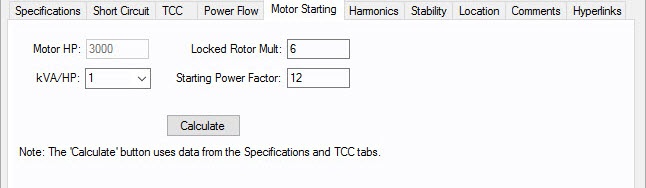
Figura 7:2 Aba Fluxo de Potência da Caixa de Diálogo dos Dados do Motor
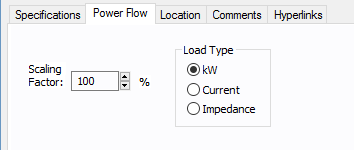
Figura 8:3 ,Dados do Motor DC - Fluxo de Potência [DC Motor Data - Power Flow]
| Opção | Descrição |
|---|---|
| kW do Motor | A potência de entrada necessária ou potência nominal do motor. |
| kVA/kW ou kVA/HP | Representa a eficiência do motor. É um fator de conversão para a potência entregue e requer uma potência de entrada. |
| Mult Rotor Bloqueado [Locked Rotor Mult] | Igual ao inverso da reatância subtransitória (também conhecida como X"dv) e provê o valor para o qual a corrente de plena carga (nominal) do motor é multiplicada sob as condições de curto-circuito. |
| Fator de Potência na Partida [Starting Power Factor] | Fator de potência momentâneo durante a partida do motor. Quando o mootor está sob as condições de partida, a potência reativa é maior do que a potência ativa tendo como resultado o fator de potência na partida. |
| Calcular |
O Calcular usa os dados das abas Especificações [Specifications] e TCC para determinar os valores de partida do motor. O EasyPower referencia as normas do IEEE para os cálculos. Por exemplo, se o Cojunto de Partida do Motor [Motor Starter] na aba TCC é configurada para algo diferente de Partida Direta [Full Voltage], isto afeta os cálculos. |
Usar a aba Harmônicos [Harmonics] para indicar se este equipamento está introduzindo harmônicos no seu sistema de potência.
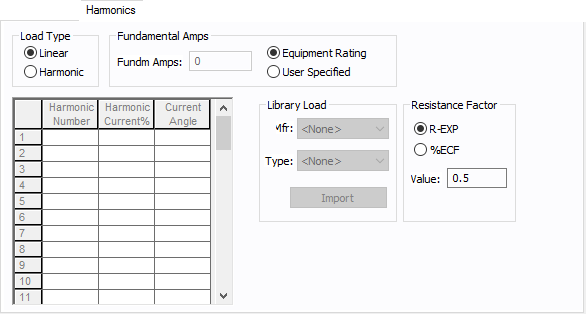
Figura 9:4 Aba Harmônicos [Harmonics Tab]
| Opção | Descrição | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Tipo de Carga [Load Type] |
O default é Linear [Linear], indicando que o equipamento não produz harmônicos. Escolhendo Harmônico [Harmonic] torna o equipamento uma fonte harmônica e outros campos nesta aba passam a ser editáveis. Nota:
|
|||||||||||||||||||||
| Corrente Fundamental |
Usar para configurar a corrente fundamental. As opções são as seguintes:
Para usar a corrente fundamental calculada pelo Power Flow, escolha Calculado a partir do Power Flow [Calculated from Power Flow] na área Soma da Tensao Fundamental [Summation Fundamental Voltage] na caixa de diálogo Opções Harmônicas > Controle [Harmonics Options > Control]. |
|||||||||||||||||||||
| Planilha Harmônica [Harmonic Spreadsheet] |
Usar a planilha para introduzir o espectro harmônico produzido por este equipamento. Você pode usar até 30 harmônicos diferentes para cada equipamento. Na planilha, entre com a Ordem Harmônica [Harmonic Number] (tal como 5 para a 5a. harmônica), a Corrente Harmônica [Harmonic Current] em porcento da corrente fundamental, e o Ângulo da Corrente [Current Angle] em graus. Pela indicação do ângulo da corrente você pode simular os efeitos da defasagem angular do transformador nos retificadores de modo que possa haver o cancelamento harmônico apropriado. A ordem harmônica pode ser inteira ou não-interia. |
|||||||||||||||||||||
| Biblioteca de Carga [Library Load] |
O espectro harmônico comum pode ser introduzido a partir da biblioteca. Para instruções de como introduzir as suas próprias informações harmônicas, veja Harmônicos com o Spectrum™ . Após selecionar uma biblioteca particular de espectro, a partir de Fabr [Mfr] e listas de Tipo [Type], clique em Importar [Import], e o espectro harmônico é introduzido na planilha dos harmônicos. |
|||||||||||||||||||||
| Fator da Resistência |
O EasyPower permite o cálculo de RH de duas maneiras:
RH = RFund * H R-EXP RH = RFund * (1+ECF*H2)/(1+ECF) Os valores default do EasyPower para o efeito skin sobre a resistência R-EXP é 0.5.
|
Harmônicos
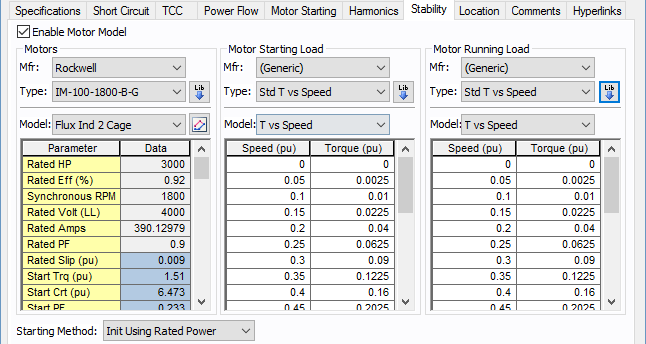
Figura 10:1 Aba Estabilidade da Caixa de Diálogo dos Dados do Motor
| Opção | Descrição |
|---|---|
| Habilitar Modelo do Motor [Enable Motor Model] |
Marque a caixa de seleção para entrar a informação de estabilidade. Sem isto, você não pode realizar uma simulação dinâmica do motor. |
| Motores [Motors] | |
| Fabric [Mfr] | Promove a listagem de todos os fabricantes disponíveis na biblioteca de dispositivos. Se um dado fabricante não está listado na biblioteca de dispositivos, você pode adicioná-lo à biblioteca. |
| Tipo | Tipos de equipamentos disponíveis do fabricante selecionado. Se o tipo desejado não está listado, você poderá adicioná-lo à biblioteca. |
 Bibl [Lib] Bibl [Lib] |
Preencha a tabela com os dados do equipamento a partir da biblioteca. Veja EasyPower Biblioteca de Dispositivos para maiores informações. |
| Modelo | Modelos de equipamentos disponíveis para o tipo de equipamento selecionado. Se o modelo desejado não está listado, você poderá adicioná-lo à biblioteca. |
 Definir Parâmetros [Define Parameters] Definir Parâmetros [Define Parameters] |
Habilita voê a obter uma estimativa dos parâmetros de circuito do motor a partir da característica torque versus rotação. Veja Definir os Parâmetros do Motor (Passo 1) [Define Motor Parameters (Step 1)]. |
| Partindo |
Este ajuste seleciona o método pelo qual o motor será inicializado. As duas opções para isto são:
Explicação [Explanation]: Existem condiçoes onde uma derivação de parâmetro de motor tenha erros significantes nas condições nominais (tal como mais de 10%) quando tentando coincidir com a curva torque versus rotação do fabricante. Isto provavelmente é criado por inconsistências nos dados fornecidos por várias razões. Para estas condições, inicializando com potência nominal através do fluxo de potência causa um novo escorregamento para manifestar através da inicialização, que não é igual ao escorregamento nominal especificado. Isto cria então, uma condição onde o torque produzido pelo motor durante a partida pode se significantemente maior do que a curva torque velocidade gerado pela derivação dos parâmetros. Para um motor no limiar da condição de partida (próximo ao rotor travado), os resultados podem mostrar uma partida com sucesso incorreta (nós temos observado torques até 12% maiores na faixa de velocidade do motor. Para corrigir isto utilize a "Inic Usando Escorregamento Nominal" ["Init Using Rated Slip"]. Isto irpa forçar o motor a recriar uma curva torque versus velocidade exata gerada com derivação dos parâmetros. Observe entretanto que as condições nominais alcançadas após a partida terão erros aceitáveis com a derivação de parâmetros. |
|
Carga de Partida do Motor [Motor Starting Load] Esta seção define as características dos modelos de carga quando o motor está partindo. |
|
| Fabric [Mfr] | Provê uma lista de características de carga disponíveis na biblioteca de dispositivos. |
| Tipo | Os tipos de carga de partida disponíveis a partir do campo fabricante selecionado acima. |
| Modelo |
Lista os modelos de carga de partida na biblioteca. As escolhas são:
|
|
Bibl [Lib] |
Preencha a tabela com os dados do equipamento a partir da biblioteca. Veja EasyPower Biblioteca de Dispositivos para maiores informações. |
|
Carga de Regime do Motor Esta seção define o modelo para a característica da carga enquanto o motor está rodando. |
|
| Fabric [Mfr] | Promove a listagem de todos os fabricantes disponíveis na biblioteca de dispositivos. Se um dado fabricante não está listado na biblioteca de dispositivos, você pode adicioná-lo à biblioteca. |
| Tipo | Tipos de equipamentos disponíveis do fabricante selecionado. Se o tipo desejado não está listado, você poderá adicioná-lo à biblioteca. |
| Modelo | Modelos de equipamentos disponíveis para o tipo de equipamento selecionado. Se o modelo desejado não está listado, você poderá adicioná-lo à biblioteca. |
|
Bibl [Lib] |
Preencha a tabela com os dados do equipamento a partir da biblioteca. Veja EasyPower Biblioteca de Dispositivos para maiores informações. Você também pode usar a ferramenta Definir Parâmetros do Motor [Define Motor Parameters] descrita abaixo para derivar os parâmetros do motor. |
Clique em Definir os Parâmetros do Motor [Define Motor Parameters] para obter uma estimativa dos parâmetros de circuito do motor usando os dados nominais de placa e a curva torque-rotação do motor. Observações apresentadas na parte superior esquerda desta janela são instruções de como usar esta ferramenta para derivar os parâmetros do motor.
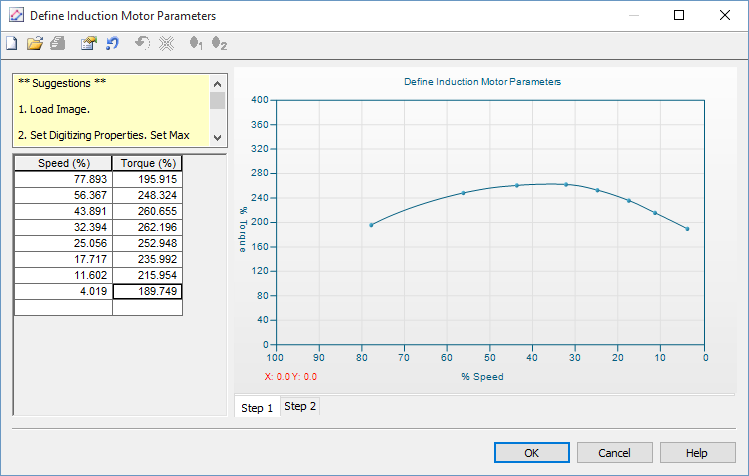
Figura 11:2 Definir os Parâmetros do Motor de Indução - Passo 1
| Opção | Descrição |
|---|---|
 Imagem da Carga [Load image] Imagem da Carga [Load image] |
Habilita você carregar uma imagem da curva do motor a ser digitalizada. |
 Ajustar o Torque Máx [Set max torque] Ajustar o Torque Máx [Set max torque] |
Entre com o torque máximo em %. |
 Inverter o eixo da velocidade [Flip speed axis] Inverter o eixo da velocidade [Flip speed axis] |
Os eixos das curvas podem ser invertidos para coincidir com a curva do fabricante. |

Figura 12:3 Definir os Parâmetros do Motor de Indução-Passo2
| Opção | Descrição |
|---|---|
|
Pontos de Gravidade [Gravity Points] |
Os pontos de gravidade são pontos móveis usados para otimizar a derivação da curva torque x rotação para valores reais da curva torque x rotação. |
|
Inverter o eixo da velocidade [Flip speed axis] |
Os eixos das curvas podem ser invertidos para coincidir com a curva do fabricante. |
|
Minimizar [Minimize] |
O botão Minimizar [Minimize] tenta reduzir o erro. |
Veja Abas Comuns para informação da Localização [Location], Comentários [Comments], Hiperlinks [Hyperlinks], Galeria de Mídia [Media Gallery], ou abas de Dados Coletados [Collected Data].
| Referência Técnica da Base de Dados | Abas Comuns |
| Galeria de Mídias |
|
|