Datos de Motor
Este cuadro de diálogo incluye las siguientes áreas y pestañas:
- Cuadro de Dialogo de Barra de herramientas de Base de datos
- Información de Conexión
- Pestaña de Especificaciones
- Pestaña de Especificaciones Motores CC
- Pestaña de Cortocircuito
- Pestaña de Curva de Disparo
- Pestaña de Flujo de Potencia
- Pestaña de Flujo de Potencia de Motor CC
- Pestaña de Arranque de Motor
- Pestaña de Armónicos
- Pestaña de Estabilidad
Ver Pestañas Comunes para más información sobre las pestañas Ubicación (Location), Confiabilidad (Reliability), Comentarios (Comments), Hipervínculos (Hyperlinks), Galería de Medios (Media Gallery), o Datos recogidos (Collected Data).
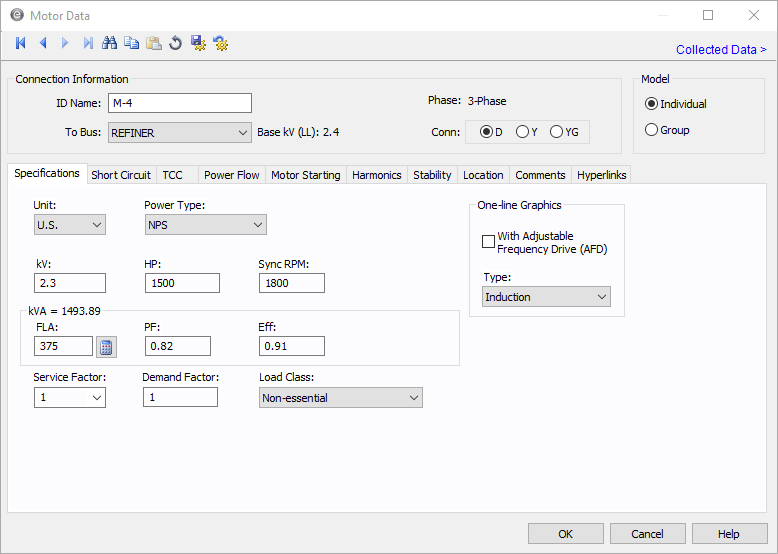
Figura 1: Cuadro de Diálogo de Datos de Motor
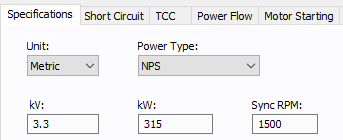
Figura 2: Cuadro de Diálogo de Datos de Motor (Métrico)
Información de Conexión
Pestaña de Especificaciones
| Opción | Descripción |
|---|---|
| Unidad | Elija o EE. UU. o Métrico. |
| Tipo de Alimentación |
El tipo de alimentación para el motor. Seleccione entre:
|
| kV | kV nominal del motor. Esta normalmente es 460 voltios en una base de 480 voltios, o 2300 voltios en una base de 2400 voltios. |
| Hp |
Caballos de fuerza del motor. Los motores pueden ser representados de forma individual o como un grupo juntados. Para un grupo de motores, escriba la potencia total del grupo. Esto indica si la unidad seleccionada es EE. UU. |
|
kW |
Kilovatios del motor Los motores pueden ser representados de forma individual o como un grupo juntados. Para un grupo de motores, escriba los kilovatios totales del grupo. Esto indica si la unidad seleccionada es métrica. |
| RPM |
Revoluciones por minuto. Se utiliza en los informes de rendimiento y para definir equipos para multiplicadores de cálculos de cortocircuito según normas de ANSI o IEC. Por predeterminación, ANSI usa 1800 y IEC usa 1500, a menos que las configuraciones de equipo por predeterminación para los motores estén configuradas para usar un valor diferente. |
| Clase de Carga | Para especificar la clase en términos de importancia. Puede seleccionar Esencial (Essential), Crítico (Critical), o No-esencial (Non-essential). Este campo no afecta el análisis. Se puede utilizar en una consulta de base de datos para distinguir una cierta clase de carga de las demás. Ver Búsqueda Avanzada para más información. |
FLA (Corriente de Plena Carga)  |
Calcula (Calculate) encuentra amperios de carga plena de las tablas de NEC si el HP del motor está enumerado en una tabla de NEC. El campo de corriente de carga plena no es necesario, no obstante, un valor mayor que 0 afecta cómo se calcula kVA. Ver Cálculos kVA del Motor. |
| FP | Factor de potencia operativa del motor. Esto se utiliza con el campo de Eficiencia para determinar kVA. Grupos de motores deben utilizar un valor promedio de factor de potencia. |
| Eficiencia | Eficiencia operativa del motor. Esto se utiliza con el campo de Factor de potencia para determinar kVA. Grupos de motores deben utilizar un valor promedio de eficiencia. |
| Factor de Servicio | El factor por el cual el motor se puede sobrecargar de forma segura. Puede seleccionar cualquier valor entre 1,0 y 1,25. |
| Factor de Demanda | Este factor se utiliza para calcular la Demanda de kVA o corriente para el motor. El factor de demanda para un motor sería la relación de la carga máxima del motor a la capacidad total nominal del motor. |
| Gráficos de Diagrama-unifilar | |
| Con Variador de Frecuencia Ajustable |
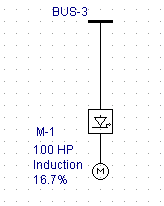
Al seleccionar esta casilla de verificación cambia el símbolo del motor en el diagrama-unifilar como se muestra abajo.
|
| Tipo |
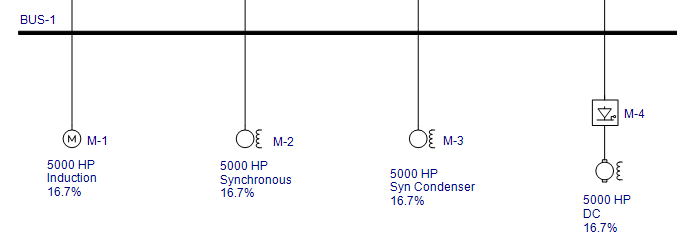
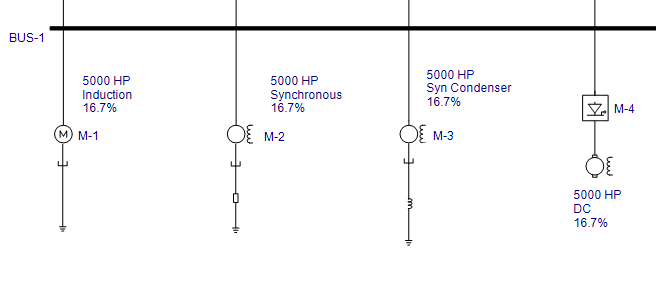
Tipo de motor (inducción, síncrono, condensador síncrono o CC). Esta elección afecta a las impedancias del motor para los cálculos de cortocircuito. El tipo también determina el símbolo del diagrama-unifilar para el motor. Estos son los símbolos si se producen para cada uno de los tipos de motor si el tipo de conexión es D (delta) o Y (estrella), que son tipos sin conexión a tierra
Estos son los símbolos que se producen para cada uno de los tipos de motor si la conexión es YG (estrella aterrada):
|
Cálculos kVA del Motor
Hay dos maneras de calcular la kVA del motor en la sección de Especificaciones del Motor del cuadro de diálogo del motor. La que EasyPower utiliza depende de los campos que decide escribir. Los métodos de cálculo de kVA se muestran abajo en orden de prioridad:
Si la Corriente de Plena Carga (FLA) es mayor que 0, se determina el motor kVA por la siguiente ecuación.
KVA = (1,73)(FLA)(kVmotor)
Si la Corriente de Plena Carga (FLA) se deja en blanco o 0, la kVA del motor será determinada por medio de la siguiente ecuación.
KVA = (HP)(0,746)/((Eficiencia)(FP))
Lo anterior se aplica a las Especificaciones de la kVA del motor. El modo de análisis de cortocircuito siempre utiliza las Especificaciones de la kVA del motor para un valor de base en el cálculo de la corriente de cortocircuito del motor. Sin embargo, el modo de análisis de flujo de potencia, que utiliza las Especificaciones de la kVA del motor por configuración predeterminada, tiene la opción de utilizar los valores de kW y kVAR de SCADA de tiempo real para calcular la kVA. Esta opción está en la pestaña Flujo de Potencia (Power Flow) del motor del cuadro de dialogo Datos de Motor (Motor Data).
Pestaña de Especificaciones Motores CC
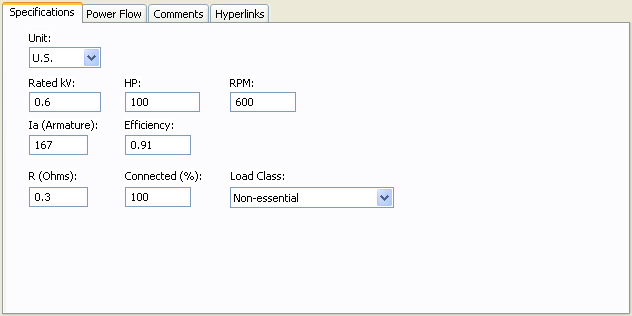
Figura 3: Pestaña de Especificaciones Motores CC
| Opción | Descripción |
|---|---|
| Unidad | Elija o EE. UU. (US) o Métrico (Metric). |
| Valor nominal kV | kV nominal del motor. |
| Hp/kW | Potencia nominal de motor (unidades EE. UU.) o kilovatios (unidades métricas) |
| RPM | Revoluciones por minuto. |
| Ia (Armadura) | Corriente nominal de la armadura en amperios. |
| Eficiencia | La relación del rendimiento de potencia mecánica a la potencia de entrada. |
|
R (ohmios) |
Resistencia de la armadura en ohmios. Esto afecta la contribución de cortocircuito. |
| Conectado (%) | Escala la contribución de cortocircuito del motor. |
| Clase de Carga | Para especificar la clase en términos de importancia. Puede seleccionar Esencial (Essential), Crítico (Critical), o No-esencial (Non-essential). Este campo no afecta el análisis. Se puede utilizar en una consulta de base de datos para distinguir una cierta clase de carga de las demás. Ver Búsqueda Avanzada para más información. |
Pestaña de Cortocircuito
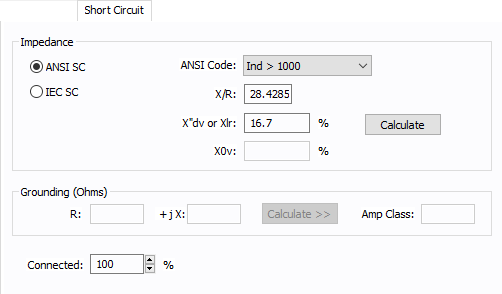
Figura 4: Pestaña de Cortocircuito del Cuadro de Diálogo de Datos de Motor
| Opción | Descripción |
|---|---|
| Cortocircuito ANSI |
Proporciona una forma fácil de escribir impedancias según las normas de ANSI y multiplicadores de interrupción de la corriente máxima de cortocircuito. Los números de código se eligen de acuerdo con el tipo de motor, tamaños y el método de modelado. Independientemente del código elegido, se utilizan los multiplicadores de valor de interrupción según normas de ANSI. Los códigos disponibles en esta lista cambian dependiendo de lo que se han seleccionado en campo Tipo (Type) de la pestaña Especificaciones (Specifications). La utilización del campo de la norma de ANSI es el método recomendado para escribir impedancias del motor para asegurar que el multiplicador apropiado de impedancia de interrupción de la corriente máxima de cortocircuito se utilice para los cálculos de la norma ANSI1,2,3,4. Ver Impedancias por Norma ANSI para más información. Si la casilla de verificación Variador de Frecuencia Ajustable (Adjustable Frequency Drive) está seleccionada en la pestaña Especificaciones (Specifications), las siguientes opciones están disponibles para el campo norma de ANSI:
Motores agrupados con un variador de frecuencia variable son motores no-regeneradores entonces no tienen una contribución independiente del tipo de motor. Referencia:
|
| Cortocircuito IEC |
Cuando seleccione esta opción, se utiliza los cálculos de cortocircuito IEC. Ver Cálculos de Impedancia y X/R por IEC. Si el motor tiene un variador de frecuencia ajustable, también puede seleccionar la opción para un variador regenerativo o no regenerativo. Motores agrupados con un variador de frecuencia variable son motores no-regeneradores entonces no tienen una contribución independiente del tipo de motor. |
| X/R | Puede escribir la relación de reactancia a resistencia, o haga clic en Calcula (Calculate) para que EasyPower rellene este campo. |
| X"d o Xlr |
Reactancia subtransitoria en porcentaje sobre la base de Hp del motor. Normalmente esto es 16,7% para motores de inducción. Si tiene el múltiplo de rotor bloqueado (LRM) que es la relación entre la corriente del rotor bloqueado y la corriente nominal del motor, entonces puede calcular la impedancia en porcentaje usando 100 / (LRM). |
|
X0v |
Reactancia saturada de secuencia cero en porcentaje sobre la base MVA del motor. Valores de secuencia cero se utilizan en cálculos de fallas a tierra. |
| Calcula | Haga clic para que EasyPower rellene los campos X/R y X" o Xlr. Puede especificar el HP promedio para motores agrupados en Herramientas > Opciones> Equipos (Tools > Options > Equipment). |
|
Puesta a Tierra Las impedancias de conexión a tierra solo se aplican a las conexiones de estrella aterrada. Las unidades son R +jX en ohmios. Si solo conoce los amperios de tierra del circuito, escribe la clase de amperios y utilice el botón Calcular (Calculate) para calcular la impedancia de puesta a tierra. |
|
|
R |
Resistencia neutro tierra en ohmios. Resistores a tierra se dan generalmente en amperios. La impedancia se encuentra de la siguiente ecuación: R = Vln / I Solo modela motores con estrella aterrada (YG) con puesta a tierra. |
|
jX |
Reactancia neutro tierra en ohmios. |
|
Calcula |
Haga clic para que EasyPower rellena los campos R y jX (si el Clase de amperios (Amp Class) se especifica) o para rellena el campo Clase de amperios (Amp Class) (si se especifican R y jX). |
|
Clase de Amperios |
Esta es la corriente en amperios a través de la impedancia de tierra a la tensión nominal. Puede escribir datos en este campo directamente en amperios o calcularlos en función de la tensión y la impedancia de tierra R + jX usando Calcular (Calculate). |
| Conectado |
Proporciona una forma fácil de ajustar la potencia total de motores utilizada en la determinación de las corrientes de cortocircuito. Al cambiar el porcentaje conectado, el HP real (valor total conectado) que escribió en el campo de Hp puede permanecer estática. Esto reduce los errores de modelado y elimina varias bases de datos para diferentes contingencias. Por ejemplo, un CCM tiene un grupo de motores de inducción (todas mayores de 50 HP) que se suman a una carga total de 600 HP. Sin embargo, 300 HP se considera copia de seguridad y no está en línea. Con el fin de mantener registros adecuados del HP del CCM, 600 sería escrito en el campo de HP. Dado que sólo 300 HP está girando en un momento dado y puede contribuir corriente de cortocircuito, el campo conectado está ajustado a 50%. |
|
RMf / X"d |
La relación de resistencia ficticia a la reactancia subtransitente que se utiliza en los cálculos de corriente de pico. Si deja en blanco, EasyPower calcula el valor basado en la norma IEC-60909. Esta opción aparece para motores síncronos si la opción Muestra campos y cálculos X/R basados en IEC-60909 (Show fields and X/R calculations based on IEC-60909) es seleccionada en Herramientas > Opciones > Equipo (Tools > Options > Equipment). |
Impedancias por Norma ANSI
|
|
|
Corriente Máxima Disponible Momentánea |
Corriente máxima de cortocircuito de interrupción |
|---|---|---|---|
|
Sincrónico |
Sincrónico |
1,0 X"dv |
1,5 X"dv |
|
Inducción>1000 |
Motor de Inducción > 1000 Hp |
1,0 X"dv |
1,5 X"dv |
|
> 250 @ 3600 |
Motor de Inducción > 250 Hp a 3600 RPM |
1,0 X"dv |
1,5 X"dv |
|
>50 |
Motor de Inducción o Grupo de Motores > 50 Hp |
1,2 X"dv |
3,0 X"dv |
|
<50 |
Grupo de Motores de Inducción < 50 Hp |
1,67 X"dv |
X"dv Infinita |
|
Agrupado |
Grupo de Motores de Inducción Agrupados |
1,0 X"dv (X=25%) |
3,0 X"dv |
Nota: X" para grupos de motores de inducción >50 HP y <50 HP típicamente se asumen igual a 16,7%. Al utilizar los multiplicadores de impedancia, esto corresponde a una contribución de motor equivalente de 3,6 a 4,8 veces la corriente a plena carga.
Cálculos de Impedancia y X/R por IEC
|
Modelo |
Tipo de Motor |
Cálculos de Impedancia y X/R |
|---|---|---|
|
Individual |
Inducción sin Variador de Frecuencia Automático |
1) Calcula la MW por polos-par al dividir MW por polos-par.
2) Calcula la relación X/R del motor.
Impedancia es 16,7%. |
|
Grupo |
Inducción sin Variador de Frecuencia Automático |
Impedancia y X/R se calcula así:
|
|
Individual o Grupo |
Inducción con Variador de Frecuencia Automático CC con Variador de Frecuencia Automático |
Impedancia es 16,7% y la relación X/R es 10. |
|
Individual o Grupo |
Sincrónico Condensador Síncrono |
Utiliza los cálculos ANSI predeterminados para impedancia y relación X/R. |
Pestaña de Curva de Disparo
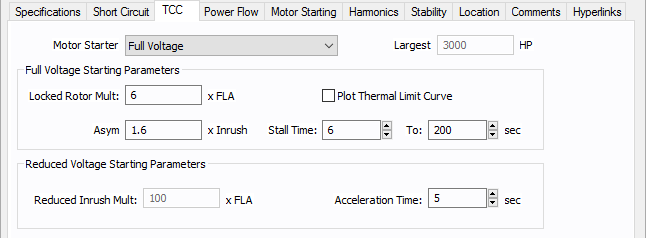
Figura 5: Pestaña de Curva de Disparo del Cuadro de Diálogo de Datos de Motor
Pestaña de Flujo de Potencia
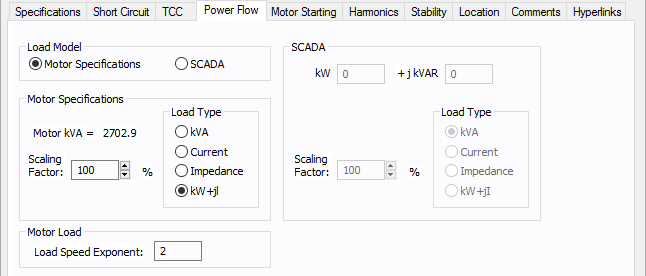
Figura 6: Pestaña de flujo de potencia del cuadro de diálogo de los datos del motor
Pestaña de Flujo de Potencia de Motor CC
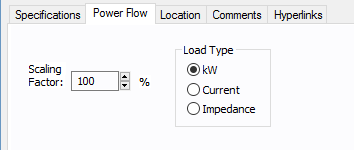
Figura 7: Datos de Motor CC - Flujo de Potencia
Pestaña de Arranque de Motor
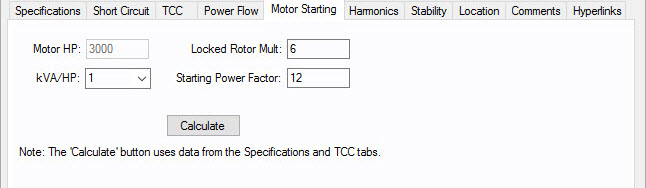
| Opción | Descripción |
|---|---|
| kW de Motor | La entrada necesaria o la potencia nominal del motor. |
| kVA/kW o kVA/HP | Representa la eficiencia del motor. Es un factor de conversión para la potencia entregada y la potencia de entrada requerida. |
| Multiplicador de Rotor Bloqueado | Igual a la inversa de la reactancia subtransitoria (también conocido como X"dv) y proporciona el valor al que la corriente de carga plena nominal del motor se multiplica bajo condiciones de cortocircuito. |
| Factor de Potencia de Arranque | El factor de potencia momentánea durante el arranque del motor. Mientras el motor está bajo condiciones de arranque, la potencia reactiva es mayor que la potencia real como resultado del factor de potencia de arranque. |
| Calcula |
Calcula utiliza los datos de las pestañas Especificaciones (Specifications) y Curva de Disparo (TCC) para determinar los valores de arranque del motor. EasyPower hace referencia a las normas de IEEE para los cálculos. Por ejemplo, si Arranque de Motor (Motor Starter) en la pestaña Curva de Disparo (TCC) se establece en algo distinto de Tensión Plena (Full Voltage), afecta a los cálculos. |
Pestaña de Armónicos
Utiliza la pestaña Armónicos (Harmonics) para indicar si este elemento del equipo introduzca armónicos al sistema de potencia.
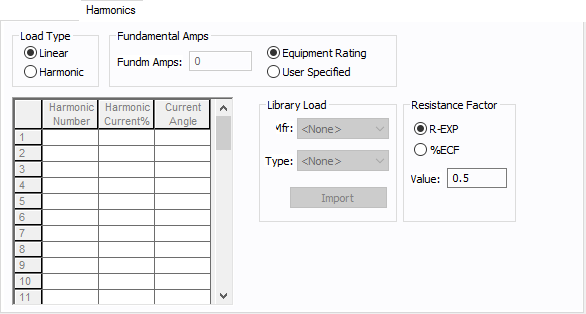
Figura 8: Pestaña de Armónicos
| Opción | Descripción | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Tipo de Carga |
El valor predeterminado es Lineal (Linear), lo que indica que el equipo no produce armónicos. La elección Armónico (Harmonic) hace que el elemento sea una fuente de armónicos y hace otros campos en esta pestaña disponibles para editar. Nota: Para un variador ajustable de frecuencia (AFD), el Tipo de Carga (Load Type) es siempre Armónico (Harmonic). |
|||||||||||||||||||||
| Amperios Fundamentales |
Utilice para configurar los amperios fundamentales. Las opciones son las siguientes:
Para utilizar la corriente fundamental calculada por el flujo de potencia, seleccione Calculado de Flujo de Potencia (Calculated from Power Flow) en el área Suma Total Tensión Fundamental (Summation Fundamental Voltage) del cuadro de dialogo Opciones Armónicos > Control (Harmonics Options > Control). |
|||||||||||||||||||||
| Hoja de Cálculo de Armónicos |
Utilice la hoja de cálculo para escribir el espectro armónico producido por el elemento. Se puede escribir hasta 30 armónicos diferentes en cada elemento de equipo. En la hoja de cálculo, escriba el Número Armónico (Harmonic Number) (tal como 5 para el 5o armónico), la Corriente Armónica (Harmonic Current) en porcentaje de los Amperios Fundamentales y el Ángulo de Corriente (Current Angle). Al indicar el ángulo de la corriente, se puede simular el efecto de desplazamiento de fase del transformador en rectificadores para facilitar la cancelación. El armónico puede ser un número entero o un número no entero. |
|||||||||||||||||||||
| Carga por Biblioteca |
Se puede escribir los espectros armónicos comunes desde la biblioteca de dispositivos. Para instrucciones sobre cómo escribir información propia de espectros, consulte Armónicos con Spectrum™. Después de seleccionar un espectro en particular de la biblioteca de dispositivos de las listas de Fabricante (Mfr) y Tipo (Type), haga clic en Importa (Import), para que ese espectro se escribe en la hoja de cálculo de armónicos. |
|||||||||||||||||||||
| Factor de Resistencia |
EasyPower ofrece dos métodos para calcular RH:
RH = RFund * H R-EXP RH = RFund * (1+ECF*H2)/(1+ECF) EasyPower se utiliza de manera predeterminada toda corrección de efecto de la piel a I-EXP y un valor de 0,5.
|
Pestaña de Estabilidad
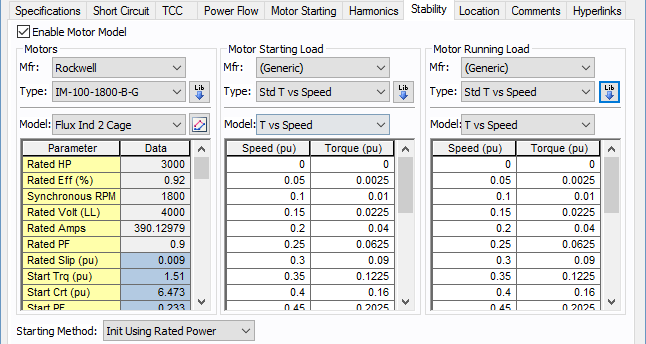
Figura 9: Pestaña de estabilidad del Cuadro de Diálogo de Datos de Motor
| Opción | Descripción |
|---|---|
| Activar Modelo de Motor |
Seleccione la casilla de verificación para escribir la información de estabilidad. Sin esto, no se puede ejecutar una simulación dinámica para el motor. |
| Motores | |
| Fabricante | Proporciona una lista de fabricantes disponibles en la biblioteca de dispositivos. Si el fabricante deseado no aparece en la biblioteca de dispositivos, puede agregarlo a la biblioteca. |
| Tipo | Tipos de equipos disponibles del fabricante seleccionado. Si el tipo deseado no aparece en la lista, puede agregarlo a la biblioteca. |
 Biblioteca Biblioteca |
Rellena la tabla con los datos de equipo de la biblioteca. Ver Biblioteca de Dispositivos de EasyPower para más información. |
| Modelo | Modelos de equipos disponibles desde el tipo de equipo seleccionado. Si el modelo deseado no aparece en la lista, puede agregarlo a la biblioteca. |
 Define Parámetros Define Parámetros |
Le permite obtener una estimación de los parámetros del circuito del motor del par vs. características de velocidad. Ver Define los parámetros de motor (paso 1). |
| Para Arrancar |
Esta configuración selecciona el método por el cual se iniciará el motor. Las dos opciones para esta configuración son:
Explicación (Explanation): Hay condiciones donde una derivación de parámetros del motor tiene errores significativos en condiciones nominales (tales como hasta 10%) cuando se intenta hacer coincidir a la curva de par frente a la velocidad de un fabricante. Esto es más probable creado por inconsistencias en los datos suministrados por diversas razones. Para tales condiciones, la inicialización a la potencia nominal definida por el flujo de potencia provoca un nuevo deslizamiento para manifestarse a través de la inicialización, lo que no es igual al deslizamiento nominal especificado. Esto entonces crea una condición donde el par producido por el motor durante el arranque puede ser significativamente mayor que la curva del par frente a la velocidad generada en el parámetro de derivación. Para un motor en una condición de arranque casi al límite (cerca de estancamiento), los resultados pueden mostrar un arranque exitoso incorrecto (han visto hasta un 12% más de par sobre el rango de velocidades del motor). Para corregir esto, seleccione "Inicio Utilizando Deslizamiento Nominal" ("Init Using Rated Slip"). Esto forzará el motor para crear de nuevo la curva exacta de velocidad de par frente a la velocidad generada en el parámetro de derivación. No obstante, se nota que las condiciones nominales a que alcanzan después del arranque tendrán el error aceptado en la derivación del parámetro. |
|
Carga Arranque de Motor Esta sección define el modelo de características de la carga durante el arranque del motor. |
|
| Fabricante | Proporciona una lista de características de la carga durante el arranque disponibles en la biblioteca del dispositivo. |
| Tipo | Tipos de carga de arranque disponibles del fabricante seleccionados arriba en el campo de fabricantes (Mfr). |
| Modelo |
Enumera modelos disponibles de carga de arranque en la biblioteca. Las opciones son:
|
|
Biblioteca |
Rellena la tabla con los datos de equipo de la biblioteca. Ver Biblioteca de Dispositivos de EasyPower para más información. |
|
Carga de Motor en Marcha Esta sección define el modelo de características de carga mientras el motor está en marcha. |
|
| Fabricante | Proporciona una lista de fabricantes disponibles en la biblioteca de dispositivos. Si el fabricante deseado no aparece en la biblioteca de dispositivos, puede agregarlo a la biblioteca. |
| Tipo | Tipos de equipos disponibles del fabricante seleccionado. Si el tipo deseado no aparece en la lista, puede agregarlo a la biblioteca. |
| Modelo | Modelos de equipos disponibles desde el tipo de equipo seleccionado. Si el modelo deseado no aparece en la lista, puede agregarlo a la biblioteca. |
|
Biblioteca |
Rellena la tabla con los datos de equipo de la biblioteca. Ver Biblioteca de Dispositivos de EasyPower para más información. También se puede utilizar la característica Define Parámetros de Motor (Define Motor Parameters) que se describe abajo para derivar los parámetros del motor. |
Define los parámetros de motor (paso 1)
Haga clic en Define parámetros del motor (Define Motor Parameters) para obtener una estimación de los parámetros del circuito del motor utilizando los valores de placa de características y la curva de velocidad-par del motor. Las notas proporcionadas en la esquina superior izquierda de esta ventana son las instrucciones sobre la utilización de esta herramienta para obtener los parámetros del motor.
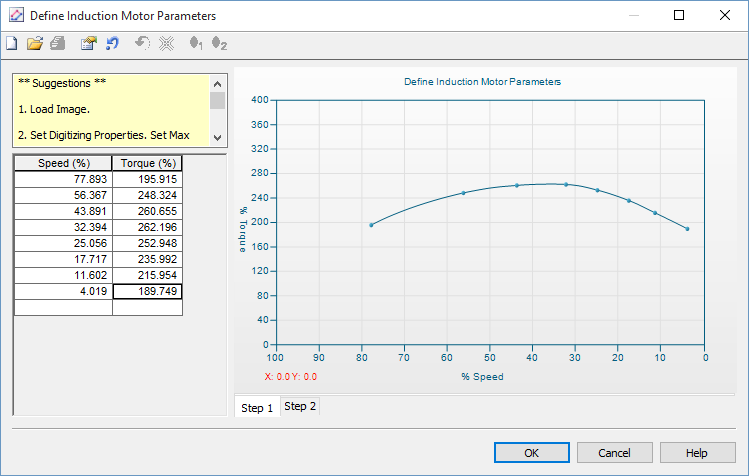
Figura 10: Define Parámetros de Motor de Inducción-Paso 1
| Opción | Descripción |
|---|---|
 Imagen de Carga Imagen de Carga |
Le permita cargar una imagen de la curva del motor para digitalizar. |
 Ajusta par máximo Ajusta par máximo |
Escriba el par máximo del motor en %. |
 Voltea el eje de velocidad Voltea el eje de velocidad |
El eje de la curva puede ser volteado para que coincida con el fabricante. |
Define los Parámetros de Motor de Inducción (Paso 2)
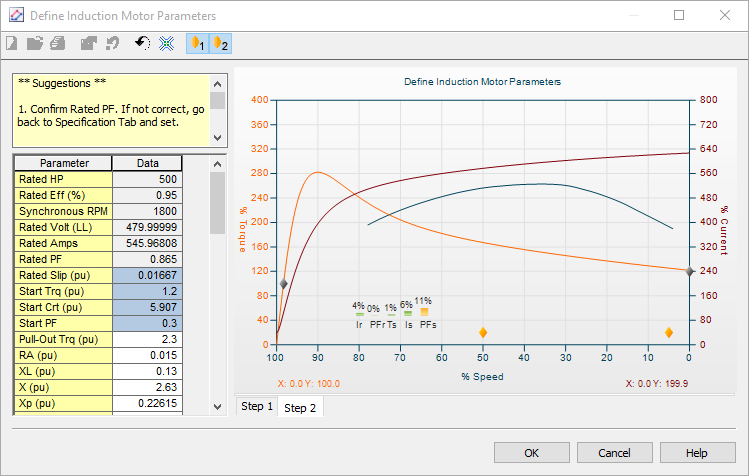
Figura 11: Define los Parámetros de Motor de Inducción-Paso 2
| Opción | Descripción |
|---|---|
|
Puntos de Gravedad |
Los puntos de gravedad son puntos móviles que se utilizan para optimizar la curva derivada de par velocidad a la curva real de par velocidad. |
|
Voltea el eje de velocidad |
El eje de la curva puede ser volteado para que coincida con el fabricante. |
|
Minimizar |
El botón Minimiza (Minimize) intenta reducir el error. |


Otras Pestañas
Ver Pestañas Comunes para más información sobre las pestañas Ubicación (Location), Confiabilidad (Reliability), Comentarios (Comments), Hipervínculos (Hyperlinks), Galería de Medios (Media Gallery), o Datos recogidos (Collected Data).
Más Información
| Referencia Técnica de Base de datos | Pestañas Comunes |
| Galería de Medios |
![]()