Motor - Stability Tab
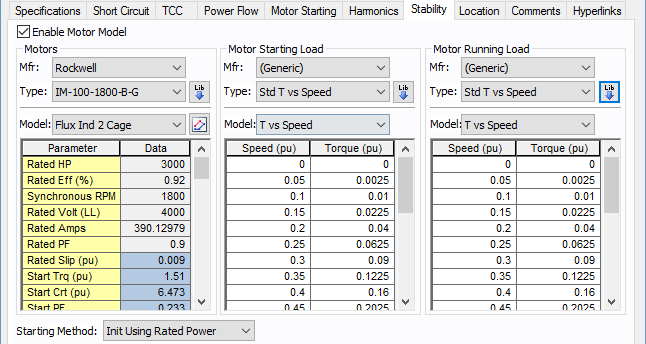
Figure 1: Stability Tab of the Motor Data Dialog Box
| Option | Description |
|---|---|
|
Enable Motor Model |
Select the check box to enter stability information. Without this, you cannot run a dynamic simulation for the motor. |
| Motors | |
|
Mfr |
Provides a list of manufacturers available in the device library. If the desired manufacturer is not listed in the device library, you can add it to the library. |
|
Type |
Equipment types available from the selected manufacturer. If the desired type is not listed, you can add it to the library. |
|
|
Populates the table with equipment data from the library. See EasyPower Device Library for more information. |
|
Model |
Equipment models available from the selected equipment type. If the desired model is not listed, you can add it to the library. |
|
|
Enables you to obtain an estimate of the motor circuit parameters from the torque vs. speed characteristics. See Define Motor Parameters . |
|
Starting |
This setting selects the method by which the motor will be initialized. The two options for this setting are:
Explanation: There are conditions where a motor parameter derivation has significant errors in rated conditions (such as upwards to 10%) when attempting to match a manufacturer's torque vs. speed curve. This is most likely created by inconsistencies in the supplied data for various reasons. For such conditions, initializing to rated power defined by the power flow causes a new slip to manifest through initialization, which is not equal to the specified rated slip. This then creates a condition where the torque produced by the motor during starting can be significantly greater than the torque vs. speed curve generated in the parameter derivation. For a motor in a borderline start condition (near stalling), the results may show an incorrect successful start (we have seen up to 12% greater torque over the motor's speed range). To correct for this, select "Init Using Rated Slip". This will force the motor to re-create the exact torque vs. speed curve generated in the parameter derivation. Note however that the rated conditions reached after starting will have the error accepted in the parameter derivation. |
|
Motor Starting Load This section defines the model for load characteristics while the motor is starting. |
|
|
Mfr |
Provides a list of starting load characteristics available in the device library. |
|
Type |
Starting load types available from the manufacturer selected in the Mfr field above. |
|
Model |
Lists available starting load models in the library. The choices are:
|
 Lib Lib |
Populates the table with equipment data from the library. See EasyPower Device Library for more information. |
|
Motor Running Load This section defines the model for load characteristics while the motor is running. |
|
|
Mfr |
Provides a list of manufacturers available in the device library. If the desired manufacturer is not listed in the device library, you can add it to the library. |
|
Type |
Equipment types available from the selected manufacturer. If the desired type is not listed, you can add it to the library. |
|
Model |
Equipment models available from the selected equipment type. If the desired model is not listed, you can add it to the library. |
|
|
Populates the table with equipment data from the library. See EasyPower Device Library for more information. You can also use the Define Motor Parameters feature described below to derive the motor parameters. |
 Define Parameters
Define ParametersMore Information
- Motor Data
- Define Motor Parameters
- Motor Data
- Database Dialog Box Toolbar
- Motor - Connection Information
- Motor - Specifications Tab
- Motor - Short Circuit Tab
- Motor - TCC Tab
- Motor - Power Flow Tab
- Motor - Motor Starting Tab
- Motor - Harmonics Tab
- Motor - Reliability Tab
- Motor - Location Tab
- Motor - Comments Tab
- Motor - Hyperlinks Tab
- Motor - Collected Data Tab
- Motor - Media Gallery Tab